253 (12)
253
13. Terestryczna pozycja obserwowana
13.10. Pozycja obserwowana z dwóch kątów poziomych
Zasada określania pozycji statku tą metodą jest taka sama, jak z trzech namiarów. Wyjątek stanowi zwiększony stopień dokładności pozycji, gdy kąty a i fi są zmierzone sekstantcm. Trudność pomiarów kątów poziomych, zwłaszcza dla niedoświadczonego obserwatora, powoduje zaniechanie stosowania tej metody na małych jednostkach. O tej metodzie, należącej do przeszłości, wspomniano tylko w kontekście omawianego tematu.
Konstrukcja pozycji na mapie jest uciążliwa, dlatego wykorzystanie kalki technicznej zamiast protraktora można stosować w razie awarii systemów nawigacyjnych. Metoda pozwala na nawigację statku bez znajomości poprawek kompasu. Zaleca się ją jako sprawdzian pozycji z trzech namiarów, gdy niepewne są wskazania żyrokompasu.
13.11. Określanie pozycji z trzech linii pozycyjnych
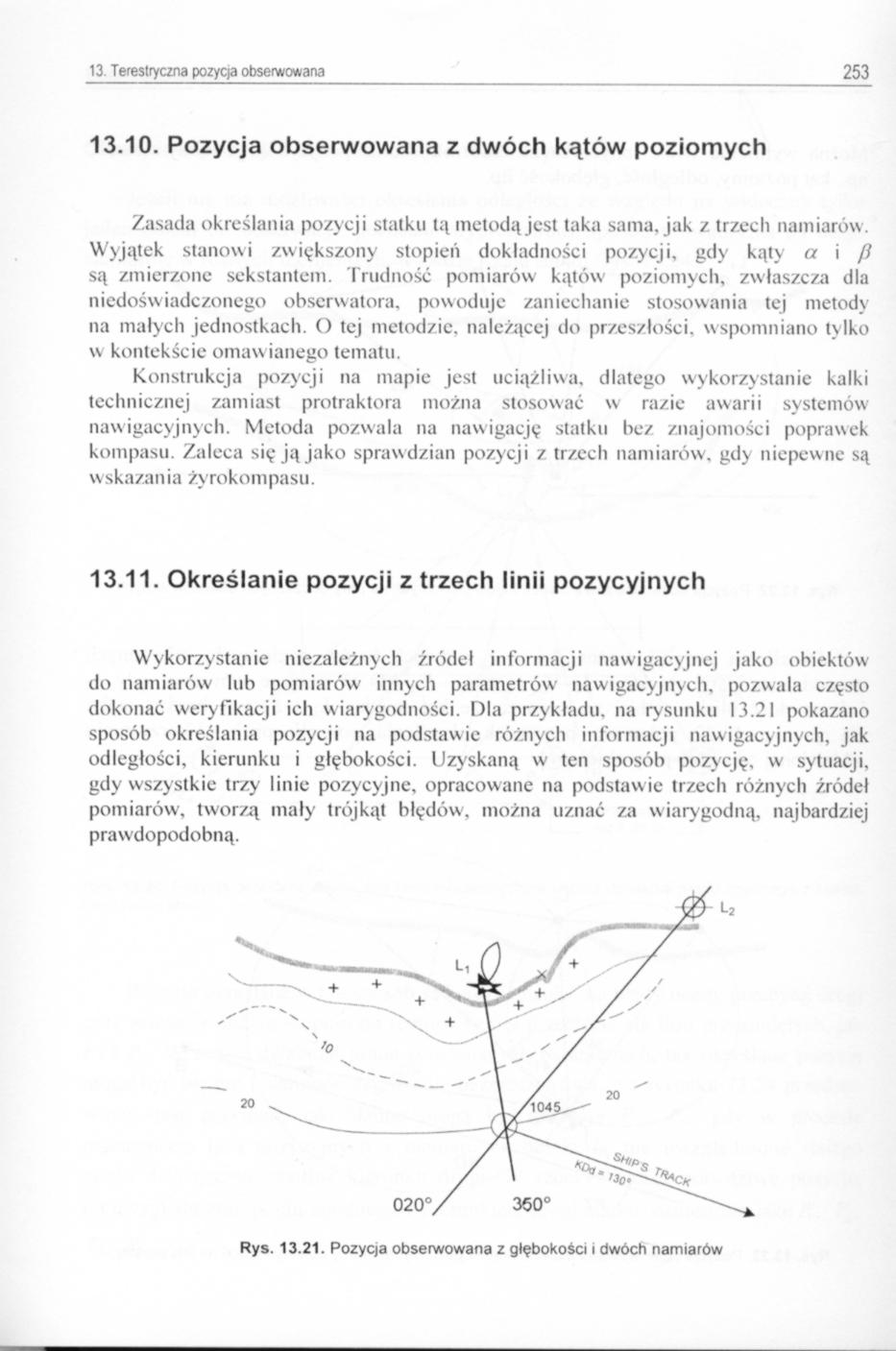
Wykorzystanie niezależnych źródeł informacji nawigacyjnej jako obiektów do namiarów lub pomiarów innych parametrów nawigacyjnych, pozwala często dokonać weryfikacji ich wiarygodności. Dla przykładu, na rysunku I3.2I pokazano sposób określania pozycji na podstawie różnych informacji nawigacyjnych, jak odległości, kierunku i głębokości. Uzyskaną w ten sposób pozycję, w sytuacji, gdy wszystkie trzy linie pozycyjne, opracowane na podstawie trzech różnych źródeł pomiarów, tworzą mały trójkąt błędów-, można uznać za wiarygodną, najbardziej prawdopodobną.
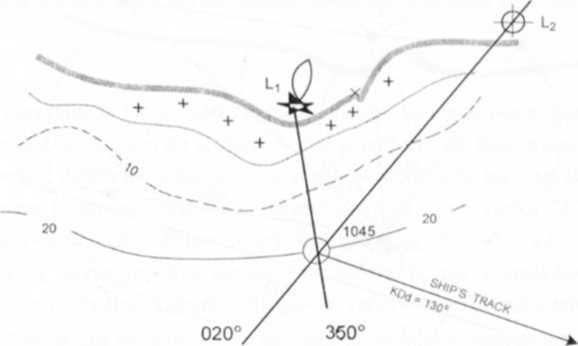
Rys. 13.21. Pozycja obserwowana z głębokości i dwóch namiarów
Wyszukiwarka
Podobne podstrony:
245 (14) 13. Terestryczna pozycja obserwowana 245 Pozycja obserwowana z dwóch odległości Wyznaczanie
247 (17) 13 Terestryczna pozycja obserwowana 247 pomiaru wynosi 45°, to kąt latarni L w momencie II
249 (14) 13 Terestryczna pozycja obserwowana 249 lub ostatnie, na obiekty w okolicy trawersu statku,
251 (12) 13. Terestryczna pozyqa obserwowana 251 Tak obliczone różnice, po uśrednieniu, pozwalają ok
255 (13) 255 13 Terestryczna pozycja obserwowana Określanie pozycji z kilku linii niejednoczesnych J
257 (13) 13 Terestryczna pozycja obserwowana 257 Rys. 13.26. Sposób graficzny oceny Kierunku drogi n
239 (17) 13 Terestryczna pozyqa obserwowana 239 Namiar wykreślany jest na zidentyfikowany znak /. na
241 (16) 13. Terestryczna pozyqa obserwowana 24113.3. Izolinia jako odcinek okręgu koła Linią pozycy
243 (16) 13 Terestryczna pozyqa obserwowana 243 Błąd odległości zmierzonej radarem wynosi od 0,01 do
lato 2 29 29
skanuj0059 matówka, 8 - wgłębnik. 9 — przegub, 10 - dźwignia zwalniacza, 11 — popychacz włącznika, 1
Pick 20of 20The 20Litter 2025 Row3: Row 4: Rew 5: Row6: R(W 7: Row8: Row9: Row 10: Row 11: Rew 12: R
więcej podobnych podstron