249 (14)
13 Terestryczna pozycja obserwowana 249
lub ostatnie, na obiekty w okolicy trawersu statku, czyli najpierw dokonuje się namiaru na obiekty, dla których zmieniają się one wolno lub bardzo wolno, ostatnie zaś pomiary dotyczą obiektów o szybko zmieniających się namiarach. Pozycje zawsze opisuje się momentem ostatniego pomiaru. Jeżeli występują błędy (systematyczne lub przypadkowe), to powstaje trójkąt błędów. Przedstawiony trójkąt błędów można zmniejszyć metodami graficznymi, przez wykreślenie dwusiecznych między namiarami L\ i Z,j L\ i Li oraz Li i Ly (rys. 13.16a). Po dodaniu stałych wartości kątowych do namiarów uzyskuje się drugi trójkąt, po czym, łącząc odpowiednie wierzchołki, otrzymuje się PO (rys. 13.1 Gb).
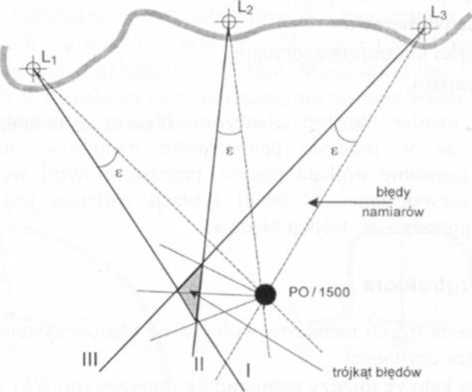
Rys. 13.16a. Trójkąt błędów z trzech namiarów oraz pozycja rzeczywista PO/1500
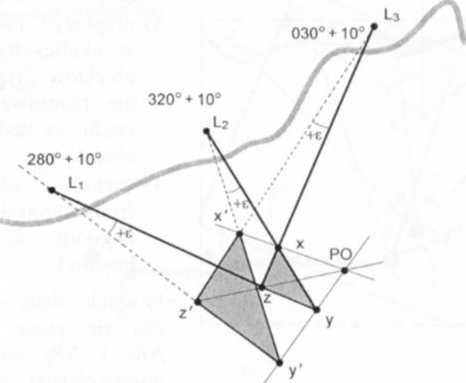
Rys. 13.16b. Metoda uzyskania pozycji z trzech namiarów przez dodanie do każdego namiaru wartości 9°
Wyszukiwarka
Podobne podstrony:
245 (14) 13. Terestryczna pozycja obserwowana 245 Pozycja obserwowana z dwóch odległości Wyznaczanie
247 (17) 13 Terestryczna pozycja obserwowana 247 pomiaru wynosi 45°, to kąt latarni L w momencie II
253 (12) 253 13. Terestryczna pozycja obserwowana13.10. Pozycja obserwowana z dwóch kątów poziomych
255 (13) 255 13 Terestryczna pozycja obserwowana Określanie pozycji z kilku linii niejednoczesnych J
257 (13) 13 Terestryczna pozycja obserwowana 257 Rys. 13.26. Sposób graficzny oceny Kierunku drogi n
278 (13) analiza pozycji obserwowanej jest znacznie łatwiejsza, jeśli się zna pozycję zliczoną. Nale
PKBWM Raport końcowy - WIM 14/13 3. Od pozycji 19 do 21 statek nie wytraca nabytej
PKBWM Raport końcowy - WIM 14/13 1. Do pozycji 13 włącznie statek utrzymuje stałą
PKBWM Raport końcowy - WIM 14/13 1. Do pozycji 13 statek poruszał się stałym kurse
236 (19) 3HK13. TERESTRYCZNA POZYCJA OBSERWOWANA13.1. Podstawy teoretyczne linii pozycyjnych Podstaw
239 (17) 13 Terestryczna pozyqa obserwowana 239 Namiar wykreślany jest na zidentyfikowany znak /. na
241 (16) 13. Terestryczna pozyqa obserwowana 24113.3. Izolinia jako odcinek okręgu koła Linią pozycy
243 (16) 13 Terestryczna pozyqa obserwowana 243 Błąd odległości zmierzonej radarem wynosi od 0,01 do
251 (12) 13. Terestryczna pozyqa obserwowana 251 Tak obliczone różnice, po uśrednieniu, pozwalają ok
40107 Untitled Scanned 14 (13) niu oka zmienić możemy plan najbliższy na najdalszy i odwrotnie. Tu z
14 (13) 249. Co to iest faaocyt? każda komórka zdolna do „wchłaniania" 250. R
308 (13) 15.4.3. Dokładność pozycji obserwowanej przy nie znanej wartości działającego znosu, l
więcej podobnych podstron