302 (15)
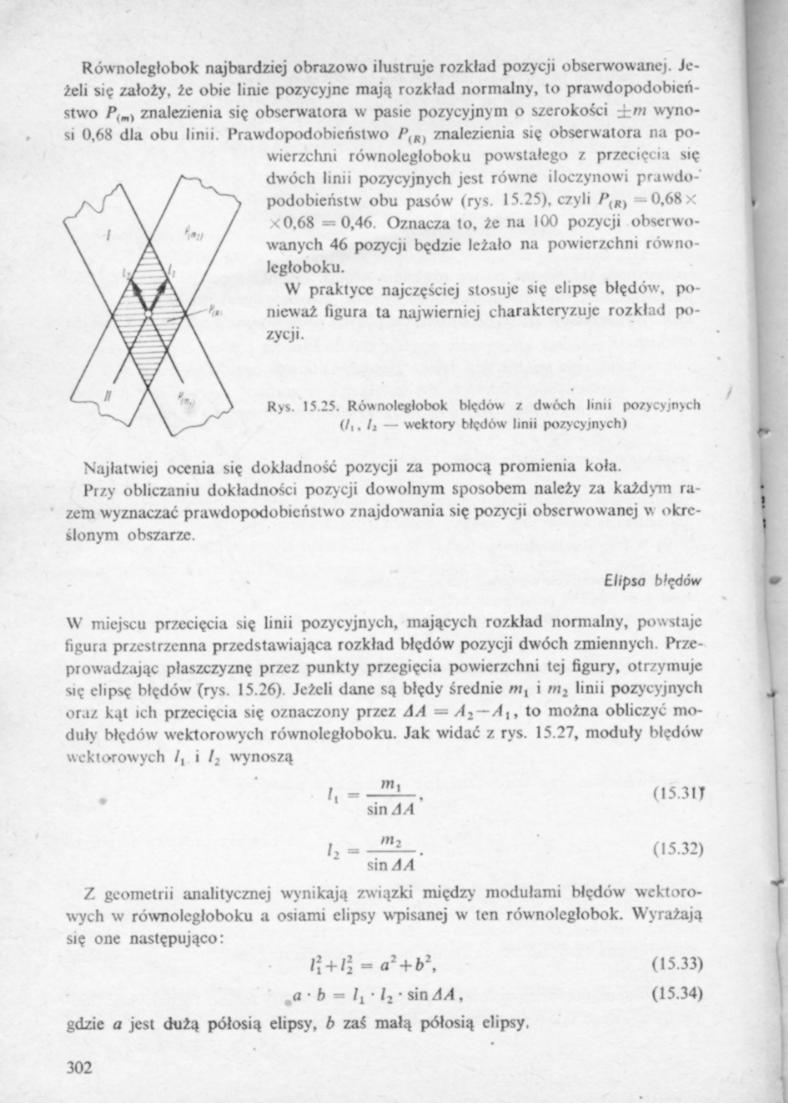
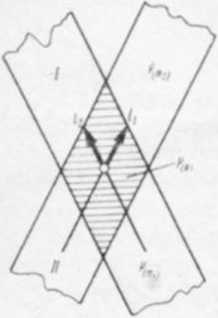
Równoległobok najbardziej obrazowo ilustruje rozkład pozycji obserwowanej. Jeżeli się założy, że obie linie pozycyjne mają rozkład normalny, to prawdopodobieństwo PimX znalezienia się obserwatora w pasie pozycyjnym o szerokości im wynosi 0,68 dla obu linii. Prawdopodobieństwo P{R) znalezienia się obserwatora na powierzchni równoległobok u powstałego z przecięcia się dwóch linii pozycyjnych jest równe iloczynowi prawdopodobieństw obu pasów (rys. 15.25). czyli P{K) — 0,68x <0.68 = 0,46 Oznacza to, że na 100 pozycji obserwowanych 46 pozycji będzie leżało na powierzchni równo-Icgłoboku.
W praktyce najczęściej stosuje się elipsę błędów, ponieważ figura ta najwierniej charakteryzuje rozkład pozycji.
Rys. 15.25. Równoległobok błędów z dwóch linii poz>cyjn>ch (/,. /j — wektory błędów linii pozycyjnych)
Najłatwiej ocenia się dokładność pozycji za pomocą promienia koła.
Przy obliczaniu dokładności pozycji dowolnym sposobem należy za każdym razem wyznaczać prawdopodobieństwo znajdowania się pozycji obserwowanej w określonym obszarze.
Elipsa błędów
W miejscu przecięcia się linii pozycyjnych, mających rozkład normalny, powstaje figura przestrzenna przedstawiająca rozkład błędów pozycji dwóch zmiennych Przeprowadzając płaszczyznę przez punkty przegięcia powierzchni tej figury, otrzymuje się elipsę błędów (rys. 15.26). Jeżeli dane są błędy średnic mx i m2 linii pozycyjnych oraz kąt ich przecięcia się oznaczony prz.cz AA = A 2 —A,, to można obliczyć moduły błędów wektorowych równoległoboku. Jak widać z rys. 15.27, moduły błędów wektorowych /, i l2 wynoszą
. I, (I5.3IT
sin AA
(15.32)
”*2
sin AA
Z geometrii analitycznej wynikają związki między modułami błędów wektorowych w równoległoboku a osiami elipsy wpisanej w ten równoległobok. Wyrażają się one następująco:
ll + ll = a2 + b2, (15.33)
mab - tŁ-l2-mAA. (15.34)
gdzie a jest dużą półosią elipsy, b zaś małą półosią elipsy.
302
Wyszukiwarka
Podobne podstrony:
235 (18) *2. Pozycja zliczona 235 Nowy kierunek drogi (KD, KR) wykreśla się z każdej pozycji obserwo
9 (197) Stntttjcxne pozycje w itM* ijc się naiczę»cicj „e na równorzędne* s^dn.kóww «T~«* „l lj.lv w
Image088 Bramka w stanie O Rysunek 4.3a ilustruje rozkład napięć i rozpływ prądów w bramce, gdy na w
Image281 Dodawanie liczb dwójkowych można zrealizować szeregowo lub równolegle, jak poglądowo ilustr
28 Vol• 15: 1972 s* 127-133 ilustr* 2 poz. bibliogr. 23## HARASYMOWICZ Jan 136. Analiza
SDC17028 HANS-GEORG STEPHAN wa część brzuśca (ryc. 15), formalnie najbardziej przypominająca puchar,
Slajd19 (15) Równoległe łączenie oporów elektrycznych 1 1 1 1 — — ■ + — +
CCF20110129�017 / / Rys. 6.19. Schemat ilustrujący rozkład natóh nia promieniowania opuszczającego s
287 (11) 15. Radar w nawigacji 287 Teoretyczna dokładność pozycji zależy od dwóch elementów: dokładn
290 (12) W układzie równań (15.10) szukanymi wielkościami są szerokość i długość pozycji obserwowane
290 (38) Tranzystor bipolarny — 290 Rys. 5.44 Ilustracjo rozkładów ładunków
308 (13) 15.4.3. Dokładność pozycji obserwowanej przy nie znanej wartości działającego znosu, l
321 (11) du 1—3 Mą to należy przyjąć, że pozycja sutku znajduje się wewnątrz rwisty rozkład pozycji
swiderki kolo part2 MPiS Kolokwium 2 31.05.2010-05-24 godz.19 Zadania (15 p) Dwuwymiarowy wektorło
więcej podobnych podstron