3
Ile impulsów przypada na pełny obrót tarczy'? Czy otrzymana wartość zgadza się z teoretyczną, tzn. 1000 impulsów/obrót? Jakie są przyczyny powstałych rozbieżności?
t
^ Co wskazuje licznik impulsów po dokonaniu pełnego obrotu w stronę przeciwną? Czy zachodzi tutaj zjawisko histerezy?
Określić rozdzielczość cyfrowego pomiaru kąta za pomocą impulsatora współpracującego z układem elektronicznym.
Zapisać przykładowe wartości napięć odpowiadające stanom logicznym 0 i I w każdym z kanałów (do pomiaru użyć multimetru V560). Czy zmierzone wartości odpowiadają standardowi TTL?
Pomiar położenia za pomocą impulsatora należy do grupy metod przyrostowych - na czym polega podstawowa cecha tej metody?
B*’ Wykorzystując skalę kątową z podziałką noniusza wyznaczyć kilka (co najmniej 10) punktów ch-ki przetwarzania impulsatora w jednym z kanałów (A lub B). W tym celu:
jako detektorów zmiany stanu należy' użyć oscyloskopu, włączonego pomiędzy zacisk kanału A lub B a masę układu cyfrowego,
- wartości kąta odczytywać na skali noniusza w momencie zaobserwowania przełączenia stanu logicznego wr badanym kanale,
w celu zbadania histerezy odczytać w ten sam sposób kolejne wartości kąta dla przeciwnego kierunku obrotu.
I Jzysknne wyniki pomiaru opracować graficznie wg wzorca przedstawionego na
rys. I.
Pryiąc ynin j tui ’0‘ Pryfacynia z '0 ' tui T
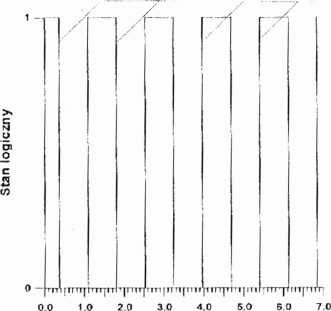
KątP]
Rys. i. Przykład opracowania charakterystyki przetwarzania impulsatora — impulsator idealny. Widoczny jest brak synchronizacji stanu impulsatora z przyjętym zerem
mechanicznym.
^ Wyznaczyć błędy analogowe badanego kanału impulsatora w odniesieniu do wartości elementarnego, rozróżnialnego przyrostu drogi kątowej: Aa = 360°/250. Czy wypełnienie otrzymanego sygnału cyfrowego (0/1) spełnia warunki podane przez, producenta tj.: 0.5 ± 0.15? Określić histerezę.
^ Uwaga! W sprawozdaniu porównać wady i zalety obu metod (tj odczytowej - tarcza z kodem Gray'a i przyrostowej - impulsator) cyfrowego pomiaru drogi kątowej
t
Wyszukiwarka
Podobne podstrony:
Ile kobiet przypada na 100 mężczyzn ? ►Statystyczna Polka iW jakim wieku rodzi dzieci ?Jak kobiety o
Obraz0144 144 Posuwem f nazywamy przesunięcie narzędzia wzdłuż osi przypadające na jeden obrót i mie
o Norma obsługi(ile stanowisk może obsługiwać jeden zespół) o Norma obsady(ile osób przypada na dany
SNC03805 przypada na chłodną połowę roku, opady w klimacie BS zawierają się w przedziale T < R &l
DSC00083 (10) Ujawnienie tajemnicy za zgodą pacjenta lub jego przedstawiciela ustawowego UJ Czy pacj
0000011702 000007 131 WACHMISTRZ DOROSZ NA LITWIE 150 A pułkownik, czy zdrów stary? Co się święci? W
-współrzędne cechowane Z wzorów na współrzędne x,y w odwzorowaniu Gaussa-Krugera otrzymujemy wartośc
WPŁYW ZAGROZEN ASYMETRYCZNYCH NA KONCEPCJĘ RÓWNOWAGI SIŁ też większość autorów zgadza się, że w tym
img034 4. SKRÓCONY MASAŻ REIKI W przypadku braku czasu na pełny masaż Reiki, możemy wykonać ten zabi
39723 P5050103 tarana « tych przypadkach w ile półkolista tA^na przestrzeli sakralną, podobnie odczy
karta pracy 8 • » Ile dziewczynek skacze na trampolinie? Ile dziewczynek przyszło po lody? Sprawdź,
więcej podobnych podstron