Image530

0i uniwibratora powoduje pojawienie się impulsu na wyjściu 02 drugiego uniwibratora. Występujące drgania zestyku K powodują ponowne wyzwolenia uniwibratora, a zatem czas trwania impulsu na wyjściu Qx przedłuża się i wynosi 7Y Ponieważ czas Tz jest większy od czasu drgań zestyków o czas 7\ = r2,

Rys. 4.682. Ulepszona wersja układu przedstawionego na rys. 4.681
więc w łatwy sposób można określić czas trwania drgań zestyku K wynoszący
Na rysunku 4.683 przedstawiono schemat logiczny układu współpracującego z zestykiem przełącznym. Działanie układu ilustrują przebiegi napięciowe, przedstawione na rys. 4.683b. Układ jest taktowany przebiegiem prostokątnym

Rys. 4.683. Układ do współdziałania z zestykiem przełącznym
a) schemat logiczny, b) przebiegi napięć
Przeł.K---- ----
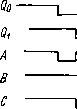
J

na wejściu „Takt”. Układ wytwarza na wyjściu A, w chwili naciśnięcia przycisku K, impuls o czasie trwania T, natomiast na wyjściu B — w chwili zwolnienia przycisku, na wejściu zaś C — impuls o czasie trwania równym odstępowi między impulsami na wyjściach A i B.
Schemat logiczny układu z wyjściem impulsowym współpracującego z zestykiem zwiemym przedstawiono na rys. 4.684. Stała czasowa Rt Ct uniwibratora powinna wynosić około 10 ms.
Na rysunku 4.685 przedstawiono inny układ współpracujący z zestykami. Naciśnięcie dowolnego przycisku Kx -=- Kz o działaniu chwilowym powoduje pojawienie się sygnału 1 na odpowiadającym mu wyjściu i jednoczesne zerowanie stanu poprzedniego. Układ może być w prosty sposób przystosowany do współpracy z większą liczbą zestyków. Na rysunku 4.686 przedstawiono układ o po-
Wyszukiwarka
Podobne podstrony:
Image617 Impuls 1 na wejściu powoduje pojawienie się impulsu 1 na wejściu tranzystora T2, co powoduj
Image462 Przykład 3. Podać rozwiązanie selektora czasowego, na którego wyjściu pojawia się impuls o
33 (81) - 62 - przed jednoczesnym pojawieniem się impulsów zliczanych na obu wejściach licznika rewe
32 (302) - 62 -0 pojawieniem się impulsów zliczanych na lika rewerayjnego). i sterujący kierunkiem z
DSC05852 (3) Zmiany chorobowe pojawiają się początkowo na ^gtawy-Y • Inwazja świerzbowców powoduje l
Załączenie klucza T powoduje pojawienie się na odbiorniku napięcia równego w przybliżeniu napięciu
img120 120 gdzie T jest przedziałem czasu (1.3.50), w którym częstotliwość pojawiania się impulsów z
P 131204 2653 m:: rodzinnego z powodu nlegojącego się owrzodzenia na przedramieniu. W danym C. Łuszc
Nauczyciel proponuje przeprowadzenie analizy słabych i mocnych stron; tłumaczy, w jakim celu pojawia
- Odtwarzacz (jeżeli kaseta jest włożona): napis “TAPE” pojawi się krótko na
Zaburzenia cyklu miesiączkowego (6) Długotrwali* leczenie substytucyjne estrogenami i gestagcnami p
więcej podobnych podstron