Mechanika ogolna0045

')<)

ITMAT 6
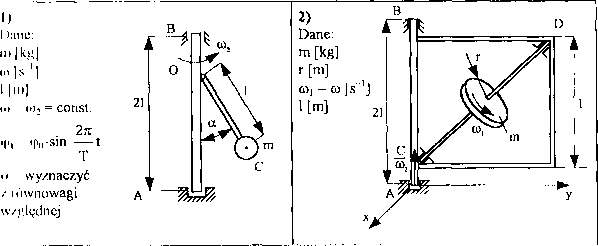
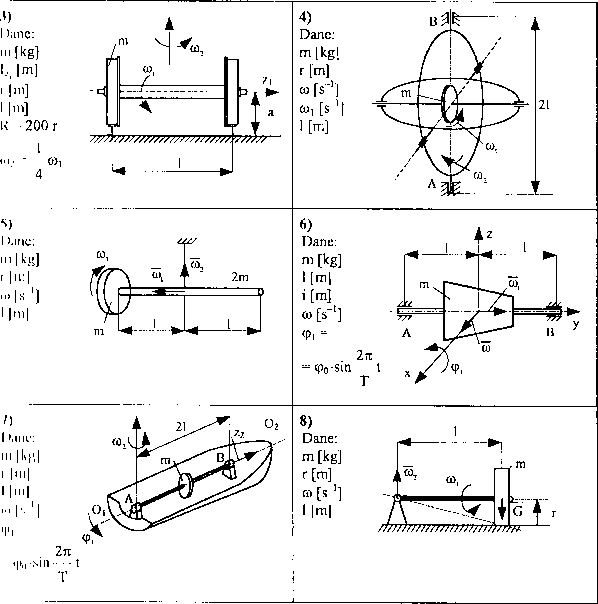
Dlii układów mechanicznych pokazanych na zamieszczonych rysunkach opisać zjawisko ruchu, stosując uproszczoną teorię żyroskopu. Podać również dyna-imczne równania ruchu poszczególnych brył.
M). Ruch dowolny bryły
Kik li dowolny ciała sztywnego (rys. 46) można rozpatrywać jako ruch złożony ' iiiclui postępowego z prędkością dowolnie obranego bieguna oraz z chwilowego ruchu obrotowego wokół osi przechodzącej przez ten biegun. Przy układaniu równań dynamicznych ruchu najdogodniej jest wybrać jako wspomniany biegun środek masy ciała. Załóżmy, że na swobodne ciało sztywne dzia-ln|i| siIy zewnętrzne. Aby otrzymać równania dynamiczne ważne w najogólniejszym przypadku ruchu ciała sztywnego, należy zastosować twierdzenie o ruchu ńmdka masy oraz równanie określapice zmianę krętu bryły względem środka musy:
Wyszukiwarka
Podobne podstrony:
Mechanika ogolna0038 /(>TEMAT 5 Dla układów mechanicznych pokazanych na zamieszczonych rysunkach
86065 Obrazek 37 DYNAMIKA temat. 5 Dla układów mechanicznych pokazanych na poniższych rysunkad podać
Mechanika ogolna0056 112Przykład 15 Opisać zjawisko ruchu układu pokazanego na rys. 65, stosując zas
Mechanika ogolna0068 136Przykład 19 Dla układu mechanicznego pokazanego na rys. 79 określić równowag
zadaniewq6 Temat 1 Koniec A mechanizmu pokazanego na rysunku porusza się według zależności x=v*t,
więcej podobnych podstron