Ruch obrotowy,řfinicja, prńôdkoŇõńá i przyspieszenie kńÖtowe bryŇāy



Ruch obrotowy bryŇāy materialnej
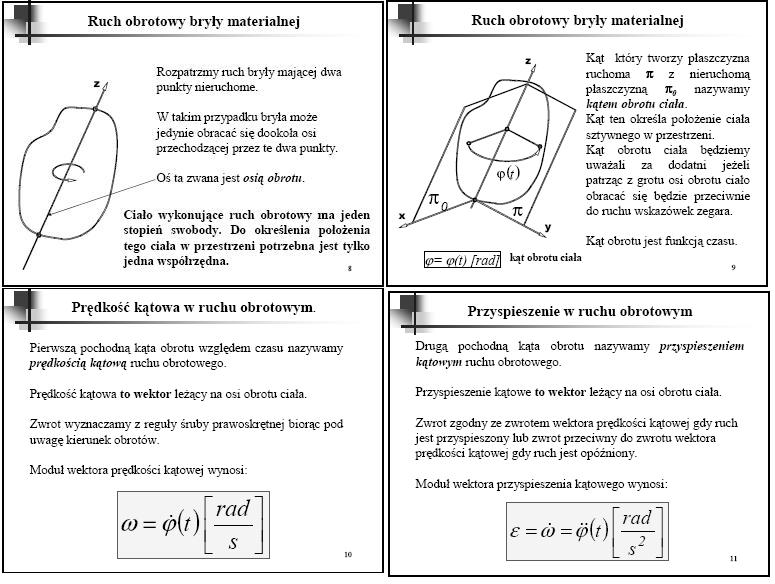
Rozpatrzmy nich bryŇāy majńÖcej dwa punku- meiuchome.
W takim przypadku bryŇāa moŇľe jedynie obracańá sińô dookoŇāa osi przechodzńÖcej przez te dwa punkt}-.
OŇõ ta zwana jest osińÖ obroni.
CiaŇāo wykonujńÖce ruch obrotowy ma jeden stopieŇĄ swobody. Do okreŇõlenia poŇāoŇľenia tego ciaŇāa w przestrzeni potrzebna jest tylko jedna wsp√≥Ňārzńôdna.
PrńôdkoŇõńá kat√≥w a w ruchu obrotowym.
ci *
PierwszńÖ pochodnńÖ kńÖta obrotu wzglńôdem czasu nazywamy prńôdkoŇõcińÖ kńÖtowńÖ mchu obrotowego.
PrńôdkoŇõńá kńÖtowa to wektor leŇľńÖcy na osi obrotu ciaŇāa.
Zwrot wyznaczamy z reguŇāy Ňõruby prawoskrńôtnej biorńÖc pod uwagńô kiemnek obrot√≥w.
ModuŇā wektora prńôdkoŇõci kńÖtowej wynosi:

Ruch obrotowy biyly materialnej
I

KńÖt kt√≥ry tworzy pŇāaszczyzna ruchoma K z nieiuchomńÖ pŇāaszczonńÖ lt0 nazywamy kńÖtem obrotu dala.
KńÖt ten okreŇõla poŇāoŇľenie ciaŇāa sztywnego w pizestizeni.
KńÖt obrotu ciaŇāa bńôdziemy uwaŇľali za dodatm jeŇľeli patrzńÖc z grotu csi obrotu ciaŇāo obracańá sińô bńôdzie przeciwnie do ruchu wskaz√≥wek zegara.
KńÖt obrotu jest funkcjńÖ czasu.

Przyspieszenie w ruchu obrotowym
DrugńÖ pochodnńÖ kńÖta obrotu nazywamy przyspieszeniem kńÖtowym ruchu obrotowego.
Przyspieszenie kńÖtowe to wektor leŇľńÖcy na osi obrotu ciaŇāa.
Zwrot zgodny ze zwrotem wektora prńôdkoŇõci kńÖtowej gdy ruch jest przyspieszony lub zwrot pizeciwny do zwrotu wektora prńôdkoŇõci kńÖtowej gdy ruch jest op√≥Ňļniony.
ModuŇā wektora pizyspieszenia kńÖtowego wynosi:
|
II ‚Ė†3 ii Oj |
'i -1_ |
|
_ S“ |
Wyszukiwarka
Podobne podstrony:
Ruch pŇāaski, prńôdkoŇõńá i przyspieszenie punktu bryŇāy %Ruch pŇāaski bryŇāy materialnejRuch pŇāaski biyly
Resize of IMG#12 wm. ///////A Dane: wymiary mechanizmu,. prńôdkoŇõńá i przyspieszenie kńÖtowe . cz
WielkoŇõci charakteryzujńÖce ruch obrotowy: -przyspieszenie kńÖtowe - zmiana prńôdkoŇõci kńÖtowej bryŇāy w
Slajd23 2 RUCH OBROTOWY - przyspieszenie kńÖtowe, a prńôdkoŇõńá kńÖtowa dco ¬£ = - dtco = + Jb dt = ¬Īet +
Slajd25 2 RUCH OBROTOWY - prńôdkoŇõńá kńÖtowa i przyspieszenie kńÖtowe w zapisie wektorowym:
Slajd4 y a.Ruch obrotowy bryŇāy sztywnej Ňörednie przyspieszenie kńÖtowe: co(t - A t)-co(t) _ A co Af ~
Slajd29 RUCH OBROTOWY - przyspieszenie kńÖtowe i liniowe w zapisie wektorowym: _ dv d(W x r) dt dt dU
ruch postepowy, predkosc, przyspieszenie w ruchu postepowym (2) %Ruch postńôpowy bryŇāy materialnej Ni
PrńôdkoŇõńá i przyŇõpieszenie punktu w ukŇāadzie naturalnym Ruch pŇāaski Rys.25 PrzyŇõpieszenie styczne i
wińôcej podobnych podstron