skanowanie0001 (21)
22
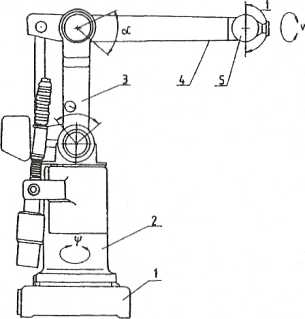
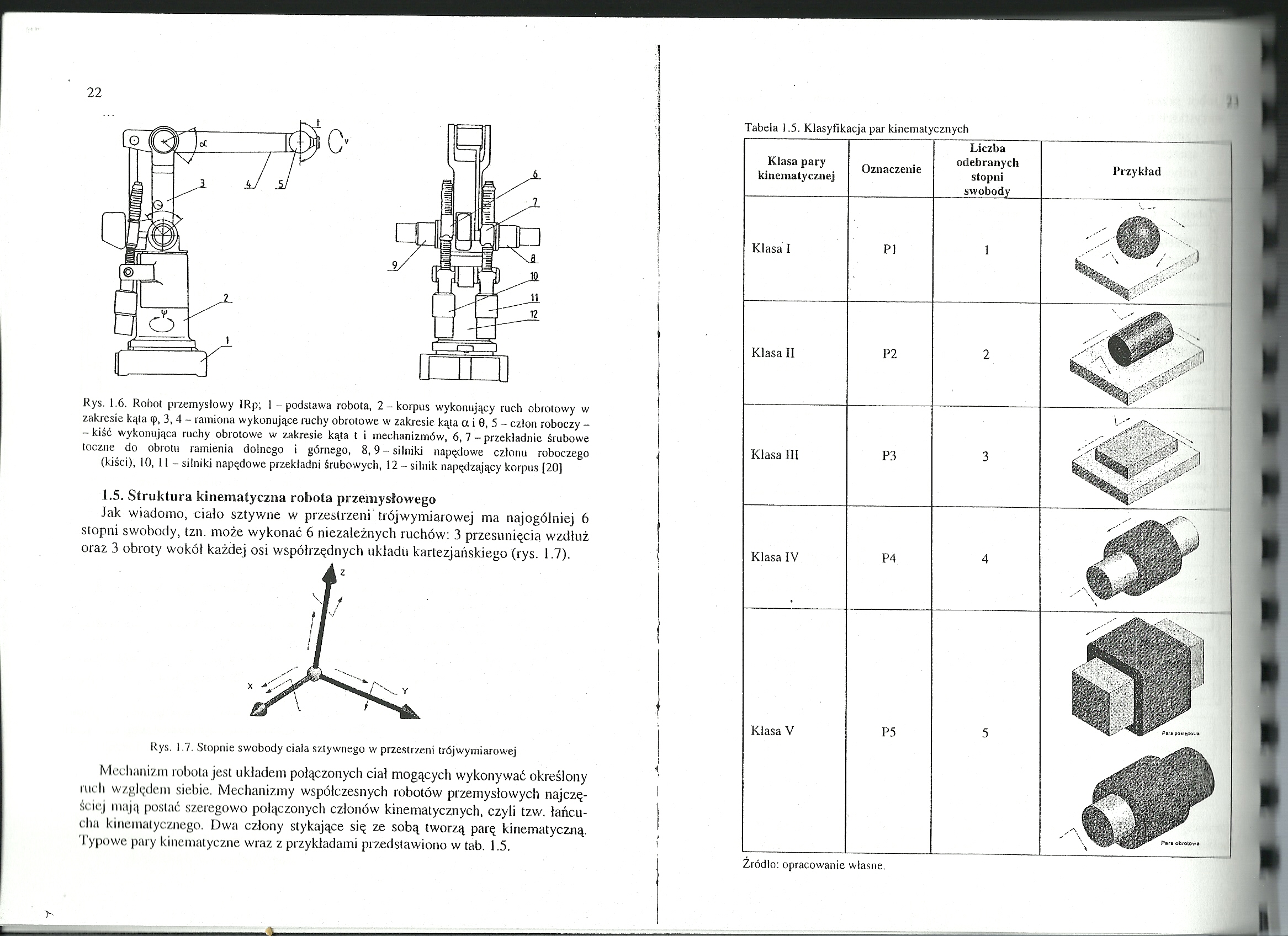
Rys. 1.6. Robot przemysłowy IRp; 1 - podstawa robota, 2-korpus wykonujący ruch obrotowy w zakresie kąta <p, 3,4 — ramiona wykonujące ruchy obrotowe w zakresie kąta a i 8,5 - człon roboczy -- kiść wykonująca ruchy obrotowe w zakresie kąta t i mechanizmów, 6,7 - przekładnie śrubowe toczne do obrotu ramienia dolnego i górnego, 8,9 - silniki napędowe członu roboczego (kiści), 10,11 - silniki napędowe przekładni śrubowych, 12 - silnik napędzający korpus [20]
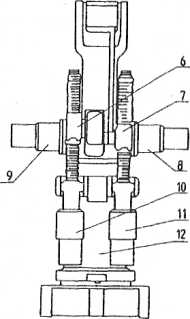
1.5. Struktura kinematyczna robota przemysłowego Jak wiadomo, ciało sztywne w przestrzeni trójwymiarowej ma najogólniej 6 stopni swobody, tzn. może wykonać 6 niezależnych ruchów: 3 przesunięcia wzdłuż oraz 3 obroty wokół każdej osi współrzędnych układu kartezjańskiego (rys. 1.7).
Rys. 1.7. Stopnie swobody ciała sztywnego w przestrzeni trójwymiarowej
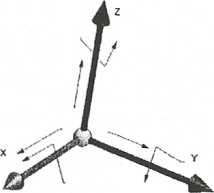
Mechanizm robota jest układem połączonych ciał mogących wykonywać określony ruch względem siebie. Mechanizmy współczesnych robotów przemysłowych najczęściej mają postać szeregowo połączonych członów kinematycznych, czyli tzw. łańcucha kinematycznego. Dwa człony stykające się ze sobą tworzą parę kinematyczną. Typowe pary kinematyczne wraz z przykładami przedstawiono w tab. 1.5.
Tabela L5. Klasyfikacja par kinematycznych
|
Klasa pary kinematycznej |
Oznaczenie |
Liczba odebranych stopni swobody | |
|
Klasa I |
PI |
I | |
|
Klasa II |
P2 |
2 | |
|
Klasa III |
P3 |
3 | |
|
Klasa IV |
P4 |
4 | |
|
Klasa V |
P5 |
5 |
Źródło: opracowanie własne.
Wyszukiwarka
Podobne podstrony:
Robot przemysłowy Manipulacja ramieniem robota, układy współrzędnych • Ruch w układach
Image 17 22 Uniwersalny Robot przemysłowy Prosty specjalizowany
Grafika Wykreślna (9) 3. Sąsiad w „koszu” naszego budynku. Rys. 23 Rysunki 21 i 22 nie wymagają zbyt
skanowanie0225 Z KSIĘGI MĄDROŚCI TYMCZASOWEJ (Glosy) Tekst na podstawie: „Chimera” 1904, t. 7, z. 20
skanowanie0003 Spis treści • 03 05-11 11 -13 13-14 15-18 18-19 20-21 22-25 26 URSA GLASSWOOL*Wymagan
skanowanie0004 (157) (porównaj rys. 21.3a i 21.3b). Za wartość przyjmuje się więc
skanowanie0225 Z KSIĘGI MĄDROŚCI TYMCZASOWEJ (Glosy) Tekst na podstawie: „Chimera” 1904, t. 7, z. 20
Robot przemysłowy Podstawowe parametry użytkowe manipulatorów przemysłowych: •
więcej podobnych podstron