Image 17
22
Uniwersalny
Robot
przemysłowy
Prosty
specjalizowany | specjalny
Stopień złożoności
łańcucha
kinematycznego
UKŁAD STEROWANIA UKŁAD KINEMATYCZNY
4-8 osi I I 4-8 osi I I 3-4 osi I Liczba stopni
“— 1 1 11 1 swobody :

Układ współrzędnych
SI
Pneumatyczny
Hydrauliczny
Elektryczny
Napęd
do 20 N
20-150 N
150 - 500 N
500-1000 N
powyżej 1000 N
Udźwig
R)
|
Roboty t generacji |
Roboty II i III generacji | |
|
Sztywne |
Elastyczne |
Programowanie.
|
Otwarty |
Ze sprzężeniem zwrotnym |
Adaptacyjny |
|
Rodzaj sterowania | ||
|
Pozyqonowame dwupołożeniowe punktowe PTP |
Pozycjonowanie punktowe PTP lub wielopunktowe MP z interpolacją |
Pozycjonowanie System ciągle CP sterowania |
i
|
Analogowa |
Analogowo-cyfrowa |
Cyfrowa | ||
|
A |
A/C |
C |
Struktura
informacji
Ryj
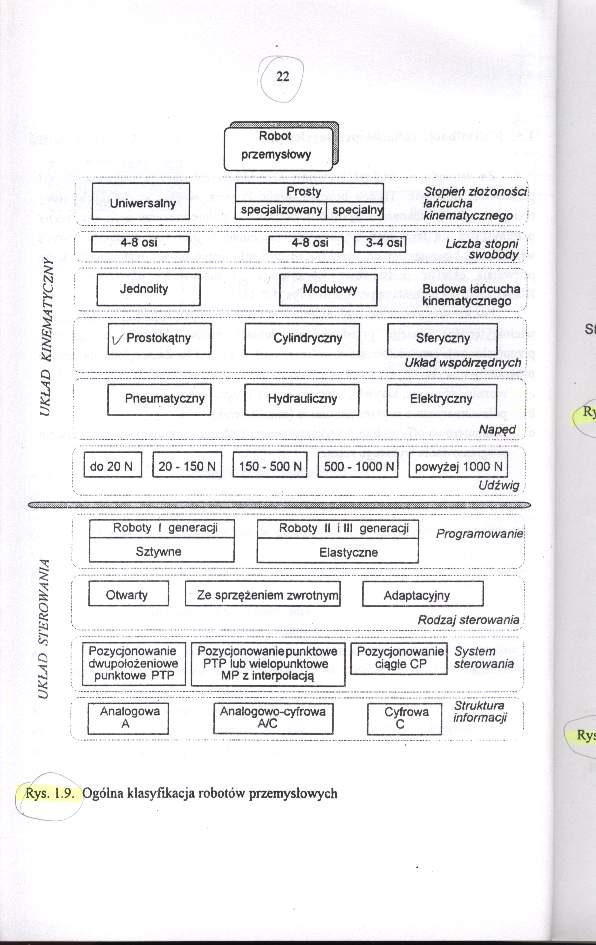
Rys. 1.9. Ogólna klasyfikacja robotów przemysłowych
Wyszukiwarka
Podobne podstrony:
skanowanie0001 (21) 22 Rys. 1.6. Robot przemysłowy IRp; 1 - podstawa robota, 2-korpus wykonujący ruc
HPIM0769 3. Budowa robotów przemysłowych 3.2.5. Roboty o strukturze kinematycznej PUMA Robot PUMA je
PIECZA MA. mad. PRZEMYSŁAW WTTEK SPECJALISTA MEDYCYNY ROOZ1NNEJ Tarnów, ul.Ka.Chrząszcza 17/39&
image 022 22 Parametry anten • pomiar zysku energetycznego, • za
więcej podobnych podstron