5224572355
Robot przemysłowy
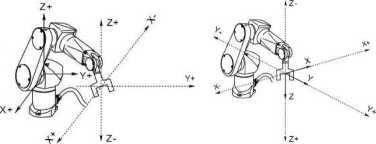
Manipulacja ramieniem robota, układy współrzędnych
• Ruch w układach współrzędnych kartezjańskich (globalnym oraz narzędzia), zmiana położenia i orientacji
Kinematyka manipulatora przemysłowego
Reprezentacja lokalizacji (pozycji i orientacji) końcówki manipulatora w układzie podstawowym (odniesienia)
Reprezentacja w postaci wektora współrzędnych konfiguracyjnych
q = [?i • ■ ■ qs]T € R6
Reprezentacja w postaci wektora opisującego położenie początku układu końcówki oraz macierzy rotacji określającej orientację układu końcówki względem ustalonego układu odniesienia.
Pe = \pŁ P&y pŁf R% = [raf of af]
■A
0lX3
Macierz transformacji jednorodnej: ' RBa Pa
Wyszukiwarka
Podobne podstrony:
skanowanie0001 (21) 22 Rys. 1.6. Robot przemysłowy IRp; 1 - podstawa robota, 2-korpus wykonujący ruc
DSC00521 (12) n, iijkfady Wspófrzędnych robota Układy współrzędnych robota przemysłowego; X, Y, Z -
skrypt wzory i prawa z objasnieniami03 4 Układy współrzędnych ■ Układem odniesienia nazywamy ciało,
Rozdział 1Trochę o robotach Według definicji ISO: „manipulacyjny robot przemysłowy jest automatyczni
2 Trochę o robotach 1.1.2 Układ współrzędnych robota przemysłowego Układ
Robot przemysłowy Struktury kinematyczne manipulatorów przemysłowych Do opisu ruchu manipulatorów
Robot przemysłowy Podstawowe parametry użytkowe manipulatorów przemysłowych: •
67726 P1080325 9. Układy sensoryczne ruchu ramienia robota przy różnych jego ustawieniach. Kalibracj
Układy sterowania robotów przemysłowych Układ sterowania robota przemysłowego powinien zapewniać
SWScan00002 Egzamin Robotyka V sem, 19.06.2006 1; maszyny^nanipulaoyjnej, robota przemysłowego,-mani
skrypt wzory i prawa z objasnieniami03 4 Układy współrzędnych ■ Układem odniesienia nazywamy ciało,
Zapis i Podstawy Konstrukcji Struktura mechanizmów 1.1.7. Ruchliwość Robota Robot przemysłowy
Rys.2.3. Ramki tłowe i układy współrzędnych tłowych. 2.1,3. Elementy orientacji
Slajd10 (18) Z pu n ktu widzeń ia rozwiązań konstrukcyjnych mobilny robot przemysłowy o ogran iczon
Pomiary Automatyka Robotyka 9/2008Projekt manipulatora dla robota mobilnego Elektron Krzysztof Miano
więcej podobnych podstron