7090997280
Zapis i Podstawy Konstrukcji Struktura mechanizmów
1.1.7. Ruchliwość Robota
Robot przemysłowy IRb-6
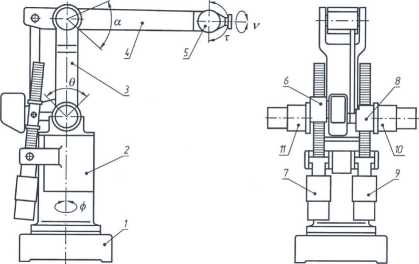
Rys. 1.16. Schemat konstrukcyjny robota IRb-6
1 - podstawa, 2 - obrotowy korpus, 3 - ramię dolne, 4 - ramię górne, 5, przegub,
6 - przekładnia śrubowa napędu obrotu 0,
7 - zespół napędowy obrotu 0,
8 - przekładnia śrubowa napędu obrotu cc,
9 - zespół napędowy obrotu a,
10 - zespół napędowy skręcania v,
11- zespół pochylania t.
Ruchliwość robota możemy określić na podstawie liczby niezależnych napędów
Robot IRb-6 wyposażony jest w pięć odrębnych układów napędowych, które realizują pięć niezależnych obrotów: (f), 0, a, v, t .
Posiada zatem pięć stopni swobody względem podstawy.
Ruchliwość tego robota można również wyliczyć ze wzoru strukturalnego dla mechanizmu przestrzennego (1.3), jednak w tym celu należy narysować jego schemat kinematyczny.
Opracował J. Felis str. 12
Wyszukiwarka
Podobne podstrony:
Zapis i Podstawy Konstrukcji Struktura mechanizmów 1.1.6.2. Ruchliwość mechanizmu płaskiego Dla
Zapis i Podstawy Konstrukcji Struktura mechanizmów 1.1.6. Ruchliwość mechanizmu Liczba stopni swobod
Zapis i Podstawy Konstrukcji Struktura mechanizmówTablica 1.2 cd. Grupa strukt. kl. 2 Schemat ogól
Zapis i Podstawy Konstrukcji Struktura mechanizmów Przedstawione w tablicy 1.2 mechanizmy podstawowe
Zapis i Podstawy Konstrukcji Struktura mechanizmów 1.1.3. Para kinematyczna Para kinematyczna jest t
Zapis i Podstawy Konstrukcji Struktura mechanizmów 1.1.4. Klasyfikacja par kinematycznych Przez klas
Zapis i Podstawy Konstrukcji Struktura mechanizmówTablica 1.1 Klasyfikacja par kinematycznych
Zapis i Podstawy Konstrukcji Struktura mechanizmów 1.1.5. Łańcuch kinematyczny. Mechanizm.
Zapis i Podstawy Konstrukcji Struktura mechanizmów Schemat kinematyczny mechanizmu Zapis i Podstawy
Zapis i Podstawy Konstrukcji Struktura mechanizmów Opracował J. Felis str. 8
więcej podobnych podstron