7090997291
Zapis i Podstawy Konstrukcji Struktura mechanizmów
1.1.6. Ruchliwość mechanizmu
Liczba stopni swobody względem nieruchomej podstawy, którą posiada dowolny układ członów (łańcuch kinematyczny) jest miarą jego ruchliwości.
Ruchliwością mechanizmu „w” nazywamy liczbę więzów, które należałoby narzucić na człony, aby łańcuch kinematyczny mechanizmu był nieruchomy względem podstawy. Jest to zatem liczba stopni swobody mechanizmu względem podstawy.
Ruchliwość w jest równa liczbie napędów, które należy przyłożyć do łańcucha kinematycznego, aby wykonywał on ściśle określony ruch czyli był mechanizmem.
1.1.6.1 Ruchliwość mechanizmu przestrzennego
Dla dowolnego układu przestrzennego wprowadzimy następujące oznaczenia: n - liczba członów ruchomych łańcucha kinematycznego,
6n - liczba stopni swobody przestrzennego układu swobodnego,
/ - klasa par występujących w łańcuchu kinematycznym / = 1, 2,..., 5,
Pi - liczba par kinematycznych klasy / - tej, i pi - liczba odebranych stopni swobody przez p( par kinematycznych,
5
' Pi - całkowita liczba odebranych stopni swobody przez wszystkie pary kinematyczne.
Ostatecznie ruchliwość mechanizmu przestrzennego wyraża się wzorem:
5
w =6 n- Y,i■ Pj
(1.3)
Przykład 1.1
i=1
ki 4
o
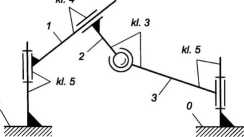
n = 3
Pi - 0, p2= 0, p3= 1, p4= 1, Ps= 2,
w =6-3 -3-1 -4-1 -5-2=1 Stąd ruchliwość całego mechanizmu w= 1
Rys.1.11. Przestrzenny czworobok przegubowy
Opracował J. Felis str. 9
Wyszukiwarka
Podobne podstrony:
Zapis i Podstawy Konstrukcji Struktura mechanizmów 1.1.6.2. Ruchliwość mechanizmu płaskiego Dla
Zapis i Podstawy Konstrukcji Struktura mechanizmów 1.1.6.3. Przykłady obliczania ruchliwości mechani
Zapis i Podstawy Konstrukcji Struktura mechanizmów 1.1.7. Ruchliwość Robota Robot przemysłowy
Zapis i Podstawy Konstrukcji Struktura mechanizmów 1.1.2. Stopnie swobody członu sztywnego Liczbą st
Zapis i Podstawy Konstrukcji Struktura mechanizmów 1. STRUKTURA MECHANIZMÓW 1.1.
Zapis i Podstawy Konstrukcji Struktura mechanizmów 1.1.8. Schematy typowych mechanizmów dźwigniowych
Zapis i Podstawy Konstrukcji Struktura mechanizmówTablica 1.2 cd. Grupa strukt. kl. 2 Schemat ogól
Zapis i Podstawy Konstrukcji Struktura mechanizmów Przedstawione w tablicy 1.2 mechanizmy podstawowe
Zapis i Podstawy Konstrukcji Struktura mechanizmów 1.1.3. Para kinematyczna Para kinematyczna jest t
Zapis i Podstawy Konstrukcji Struktura mechanizmów 1.1.4. Klasyfikacja par kinematycznych Przez klas
Zapis i Podstawy Konstrukcji Struktura mechanizmówTablica 1.1 Klasyfikacja par kinematycznych
Zapis i Podstawy Konstrukcji Struktura mechanizmów 1.1.5. Łańcuch kinematyczny. Mechanizm.
Zapis i Podstawy Konstrukcji Struktura mechanizmów Schemat kinematyczny mechanizmu Zapis i Podstawy
Zapis i Podstawy Konstrukcji Struktura mechanizmów Opracował J. Felis str. 8
23 luty 07 (20) 1.1.6. Ruchliwość mechanizmu Liczba stopni swobody względem nieruchomej podstawy, kt
więcej podobnych podstron