7090997281
Zapis i Podstawy Konstrukcji Struktura mechanizmów
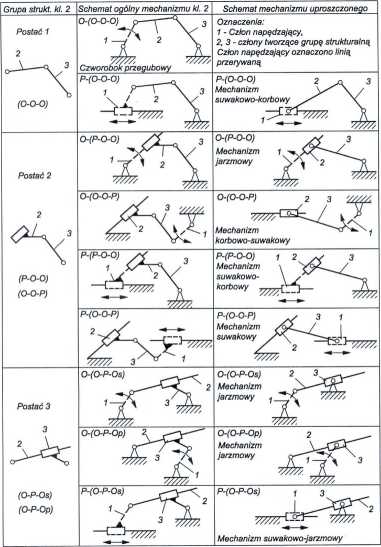
1.1.8. Schematy typowych mechanizmów dźwigniowych o prostej strukturze
Oznaczenia : O - obrót, P - przesunięcie, Op - obrót pręta, Os - obrót suwaka Przykład: symbol 0-0-0 oznacza łańcuch kinematyczny, w którym występują wyłącznie pary kinematyczne obrotowe.
Tablica 1.2
Opracował J. Felis str. 13
Wyszukiwarka
Podobne podstrony:
Zapis i Podstawy Konstrukcji Struktura mechanizmówTablica 1.2 cd. Grupa strukt. kl. 2 Schemat ogól
Zapis i Podstawy Konstrukcji Struktura mechanizmów Schemat kinematyczny mechanizmu Zapis i Podstawy
Zapis i Podstawy Konstrukcji Struktura mechanizmów 1. STRUKTURA MECHANIZMÓW 1.1.
Zapis i Podstawy Konstrukcji Struktura mechanizmów 1.1.6.2. Ruchliwość mechanizmu płaskiego Dla
Zapis i Podstawy Konstrukcji Struktura mechanizmów 1.1.6.3. Przykłady obliczania ruchliwości mechani
Zapis i Podstawy Konstrukcji Struktura mechanizmów 1.1.7. Ruchliwość Robota Robot przemysłowy
Zapis i Podstawy Konstrukcji Struktura mechanizmów Przedstawione w tablicy 1.2 mechanizmy podstawowe
Zapis i Podstawy Konstrukcji Struktura mechanizmów 1.1.2. Stopnie swobody członu sztywnego Liczbą st
Zapis i Podstawy Konstrukcji Struktura mechanizmów 1.1.3. Para kinematyczna Para kinematyczna jest t
Zapis i Podstawy Konstrukcji Struktura mechanizmów 1.1.4. Klasyfikacja par kinematycznych Przez klas
Zapis i Podstawy Konstrukcji Struktura mechanizmówTablica 1.1 Klasyfikacja par kinematycznych
Zapis i Podstawy Konstrukcji Struktura mechanizmów 1.1.5. Łańcuch kinematyczny. Mechanizm.
Zapis i Podstawy Konstrukcji Struktura mechanizmów Opracował J. Felis str. 8
Zapis i Podstawy Konstrukcji Struktura mechanizmów 1.1.6. Ruchliwość mechanizmu Liczba stopni swobod
więcej podobnych podstron