7090997278
Zapis i Podstawy Konstrukcji Struktura mechanizmów
1.1.6.2. Ruchliwość mechanizmu płaskiego
Dla dowolnego układu płaskiego mechanizmu mamy odpowiednio: n - liczba członów ruchomych łańcucha kinematycznego,
3n - liczba stopni swobody płaskiego układu swobodnego, i - klasa par występujących w łańcuchu kinematycznym i = 4, 5, p4, Ps, - liczba par kinematycznych odpowiednio klasy 4-tej i 5-tej (i- 3)pi- liczba odebranych stopni swobody przez pj par kinematycznych
Należy zwrócić uwagę, że w mechanizmach płaskich mogą występować jedynie pary kinematyczne klasy 4-tej i 5-tej)
5
~3) -Pj = Pą + 2 ■ p5 _ całkowita liczba odebranych stopni swobody przez wszystkie pary kinematyczne.
Ostatecznie ruchliwość mechanizmu płaskiego wyraża się wzorem:
5
(1.4a)
w = 3 n- t(i-3)- Pi
i=4
lub
\w = 3 • n - p4 - 2 • p7] (1-4t>)
Przykład 1.2
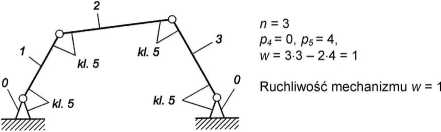
Rys. 1.12. Płaski czworobok przegubowy
Opracował J. Felis str. 10
Wyszukiwarka
Podobne podstrony:
Zapis i Podstawy Konstrukcji Struktura mechanizmów 1.1.6.3. Przykłady obliczania ruchliwości mechani
Zapis i Podstawy Konstrukcji Struktura mechanizmów 1.1.7. Ruchliwość Robota Robot przemysłowy
Zapis i Podstawy Konstrukcji Struktura mechanizmów 1.1.6. Ruchliwość mechanizmu Liczba stopni swobod
Zapis i Podstawy Konstrukcji Struktura mechanizmów 1. STRUKTURA MECHANIZMÓW 1.1.
Zapis i Podstawy Konstrukcji Struktura mechanizmów 1.1.8. Schematy typowych mechanizmów dźwigniowych
Zapis i Podstawy Konstrukcji Struktura mechanizmówTablica 1.2 cd. Grupa strukt. kl. 2 Schemat ogól
Zapis i Podstawy Konstrukcji Struktura mechanizmów Przedstawione w tablicy 1.2 mechanizmy podstawowe
Zapis i Podstawy Konstrukcji Struktura mechanizmów 1.1.2. Stopnie swobody członu sztywnego Liczbą st
Zapis i Podstawy Konstrukcji Struktura mechanizmów 1.1.3. Para kinematyczna Para kinematyczna jest t
Zapis i Podstawy Konstrukcji Struktura mechanizmów 1.1.4. Klasyfikacja par kinematycznych Przez klas
Zapis i Podstawy Konstrukcji Struktura mechanizmówTablica 1.1 Klasyfikacja par kinematycznych
Zapis i Podstawy Konstrukcji Struktura mechanizmów 1.1.5. Łańcuch kinematyczny. Mechanizm.
Zapis i Podstawy Konstrukcji Struktura mechanizmów Schemat kinematyczny mechanizmu Zapis i Podstawy
Zapis i Podstawy Konstrukcji Struktura mechanizmów Opracował J. Felis str. 8
więcej podobnych podstron