skrypt wzory i prawa z objasnieniami03
4
Układy współrzędnych
■ Układem odniesienia nazywamy ciało, względem którego rozpatruje się ruch punktu materialnego (czystki) Z układem odniesienia można związać układ współrzędnych, dzięki czemu położenie każdego poruszającego się punktu względem układu odniesienia można jednoznacznie określić za pomocą trzech współrzędnych (dla ruchu w przestrzeni), dwóch współrzędnych (dla ruchu w płaszczyźnie) luh jednej współrzędnej (dla ruchu po zadanej linii).
■ W zadaniach najczęściej mamy do czynienia z ruchem prostoliniowym i ruchem płaskim Stosujemy wtedy układy współrzędnych kartezjański jedno-i dwuwymiarowy oraz układ biegunowy W przypadku ruchu trójwymiarowego stosujemy układy współrzędnych kartezjaóski trójwymiarowy, cylindryczny (walcowy) i sferyczny (kulisty).
■ Wektorem położenia lub promieniem wodzącym danej cząstki nazywamy wektor łączący początek układu współrzędnych z punktem, w którym znajduje się cząstka.
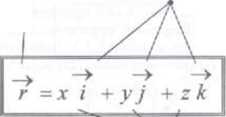
■ W układzie kartezjańskim rzuty wektora położenia na osie układu współrzędnych są równe współrzędnym punktu, w którym znajduje się cząstka
r - rx i + ryj + r: k =x i + yj + zk Wektory' jednostkowe, czyli wersory (wektory o długości równej 1), są w tym przypadku skierowane zgodnie ze zwrotem osi współrzędnych, mają wiec stały
kierunek w przestrzeni. Oznacza się je najczęściej symbolami i, j , k, ale czasami również x,y,z.
Długość wektora położenia w kartezjańskim układzie współrzędnych wynosi
r=|7| = ^+>2-iJ
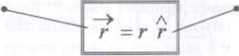
■ W układzie biegunowym współrzędnymi punktu P, w którym znajduje się cząstka są r - odległość punktu od początku układu O oraz kąt o między prostą przechodzącą przez punkty O i P a przechodzącą przez początek układu prostą zwaną osią biegunową W'ektor położenia cząstki zadany jest wzorem podanym w punkcie ł 2 Natomiast wektory prędkości, przy spieszenia (czy też dowolny inny wektor) zapisujemy w postaci
4 A 4 A
A - Ar ^ +/J <p <p
gdzie Ar i /tę są rzutami wektora A na kierunki wyznaczone przez wersory r i
<p związane z położeniem punktu P. Wersor V leży na prostej OP a wersor $
jest prostopadły do niego i zwTócony w stronę wzrostu kąta <j> Długość —►
wektora A w układzie biegunowym wynosi
Kinematyka 5
1. Wektor położenia (promień wodzący)
1.1 Wektor położenia we współrzędnych kartezjańskich
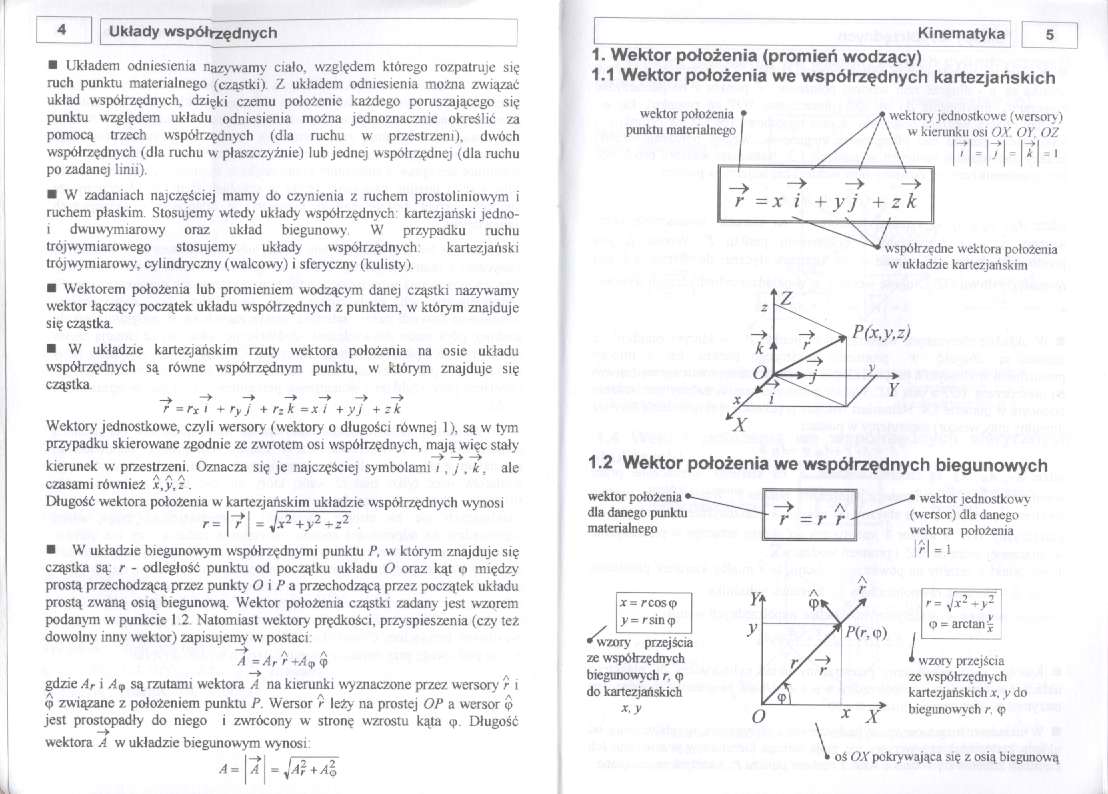
wektor położenia f punktu materialnego
wektory jednostkowe (wersory) w kierunku osi OX. OY. OZ
m-m-m ■
współrzędne wektora położenia w układzie kartezjańskim
1.2 Wektor położenia we współrzędnych biegunowych
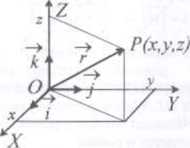
wektor położenia dla danego punktu materialnego
wektor jednostkow y (wersor) dla danego wektora położenia |r| = 1
= reosep = rsin<p
*/\vzory przejścia ze współrzędnych biegunowych r. <p do kartezjańskich x.y

• wzory przejścia ze współrzędnych kartezjańskich x. y do biegunowych r. <p
t l
r=
<? = aretan -
oś OX pokrywająca się z osią biegunową
Wyszukiwarka
Podobne podstrony:
skrypt wzory i prawa z objasnieniami03 4 Układy współrzędnych ■ Układem odniesienia nazywamy ciało,
skrypt wzory i prawa z objasnieniami04 6 Układy współrzędnych ■ W układzie cylindr
skrypt wzory i prawa z objasnieniami05 8 Prędkość ■ Tor jest to krzywa opisywana w przestrzeni przez
skrypt wzory i prawa z objasnieniami05 8Prędkość ■ Tor jest to krzywa opisywana w przestrzeni przez
skrypt wzory i prawa z objasnieniami61 120Gaz doskonały. Równanie van der Waałsa ■
skrypt wzory i prawa z objasnieniami61 120Gaz doskonały. Równanie van der Waałsa ■
skrypt wzory i prawa z objasnieniami19 □ Siła Coriolisa ■ Siła Coriolisa (siła bezwładności Conohsa)
skrypt wzory i prawa z objasnieniami47 92 J 1 Małe drgania ■ Jeżeli energia potencjalna układu, któr
skrypt wzory i prawa z objasnieniami06 10Prędkość ■ Wzór na prędkość w kartezjańskim układzie współr
skrypt wzory i prawa z objasnieniami08 14Przyspieszenie ■ Wzór na przyspieszenie w biegunowym układz
skrypt wzory i prawa z objasnieniami18 34 Siły bezwładności ■ Jeżeli układ odniesi
skrypt wzory i prawa z objasnieniami08 14Przyspieszenie ■ Wzór na przyspieszenie w biegunowym układz
skrypt wzory i prawa z objasnieniami24 46 Pole grawitacyjne ■ Pole grawitacyjne przy powierzchni Zie
skrypt wzory i prawa z objasnieniami25 Pole sił zachowawczych (potencjalnych) ■ Jeśli w każdym punkc
skrypt wzory i prawa z objasnieniami37 72Moment bezwładności ■ Moment bezwładności
więcej podobnych podstron