0000055
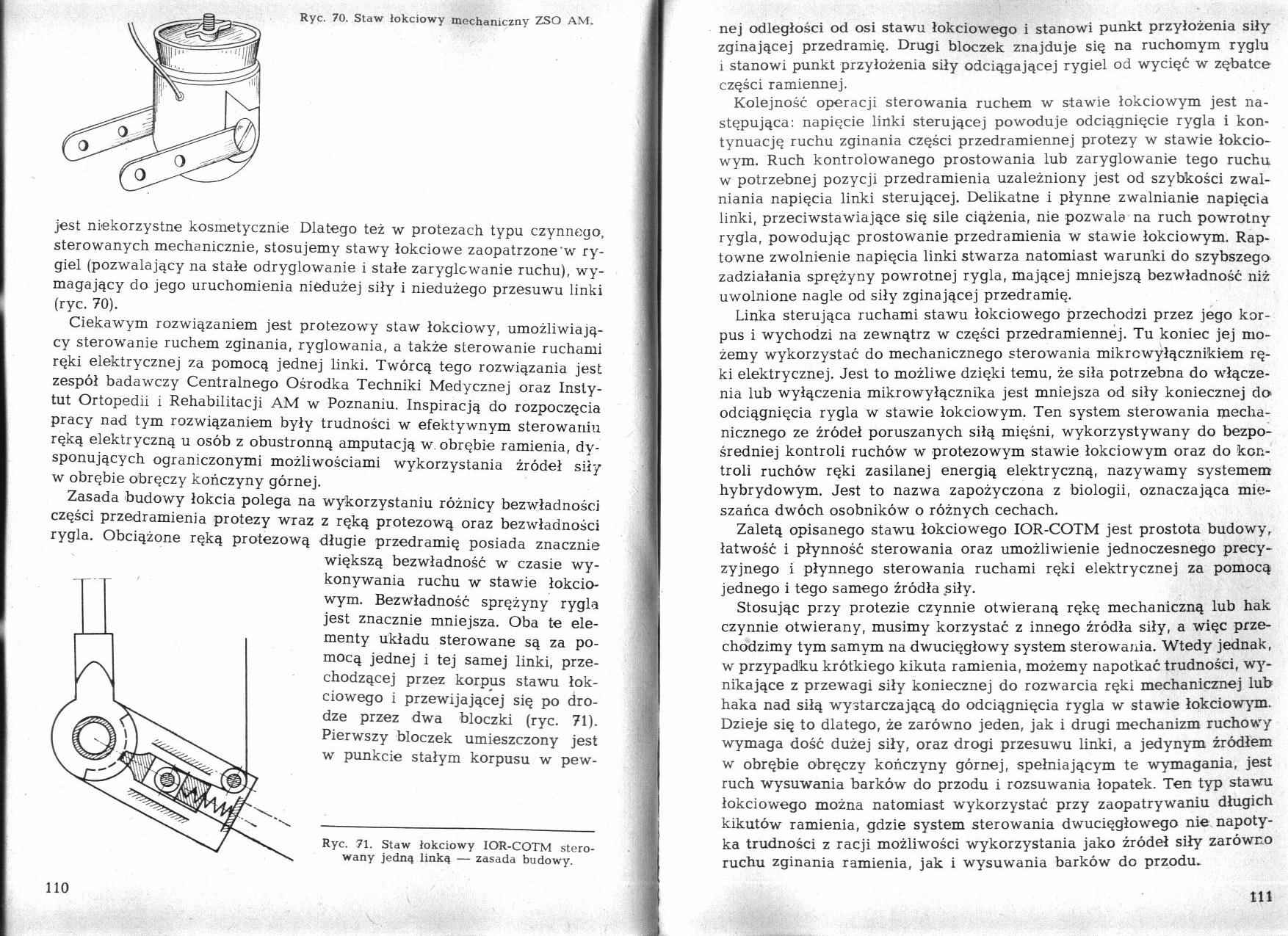
Ryc. 70. Staw łokciowy mechaniczny ZSO AM.
jest niekorzystne kosmetycznie Dlatego też w protezach typu czynnego, sterowanych mechanicznie, stosujemy stawy łokciowe zaopatrzone'w rygiel (pozwalający na stałe odryglowanie i stałe zaryglowanie ruchu), wymagający do jego uruchomienia niedużej siły i niedużego przesuwu linki (ryc. 70).
Ciekawym rozwiązaniem jest protezowy staw łokciowy, umożliwiający sterowanie ruchem zginania, ryglowania, a także sterowanie ruchami ręki elektrycznej za pomocą jednej linki. Twórcą tego rozwiązania jest zespół badawczy Centralnego Ośrodka Techniki Medycznej oraz Instytut Ortopedii i Rehabilitacji AM w Poznaniu. Inspiracją do rozpoczęcia pracy nad tym rozwiązaniem były trudności w efektywnym sterowaniu ręką elektryczną u osób z obustronną amputacją w obrębie ramienia, dysponujących ograniczonymi możliwościami wykorzystania źródeł siły w obrębie obręczy kończyny górnej.
Zasada budowy łokcia polega na wykorzystaniu różnicy bezwładności części przedramienia protezy wraz z ręką protezową oraz bezwładności rygla. Obciążone ręką protezową długie przedramię posiada znacznie
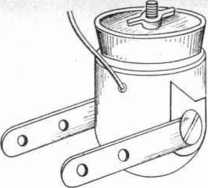
większą bezwładność w czasie wykonywania ruchu w stawie łokciowym. Bezwładność sprężyny rygla jest znacznie mniejsza. Oba te elementy układu sterowane są za pomocą jednej i tej samej linki, przechodzącej przez korpus stawu łokciowego i przewijającej się po drodze przez dwa bloczki (ryc. 71). Pierwszy bloczek umieszczony jest w punkcie stałym korpusu w pew-
A
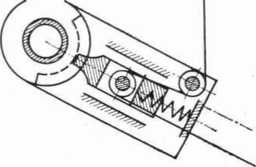
Ryc. 71. Staw łokciowy IOR-COTM sterowany jedną linką — zasada budowy.
nej odległości od osi stawu łokciowego i stanowi punkt przyłożenia siły zginającej przedramię. Drugi bloczek znajduje się na ruchomym ryglu i stanowi punkt przyłożenia siły odciągającej rygiel od wycięć w zębatce części ramiennej.
Kolejność operacji sterowania ruchem w stawie łokciowym jest następująca: napięcie linki sterującej powoduje odciągnięcie rygla i kontynuację ruchu zginania części przedramiennej protezy w stawie łokciowym. Ruch kontrolowanego prostowania lub zaryglowanie tego ruchu w potrzebnej pozycji przedramienia uzależniony jest od szybkości zwalniania napięcia linki sterującej. Delikatne i płynne zwalnianie napięcia linki, przeciwstawiające się sile ciążenia, nie pozwala na ruch powrotny rygla, powodując prostowanie przedramienia w stawie łokciowym. Raptowne zwolnienie napięcia linki stwarza natomiast warunki do szybszego zadziałania sprężyny powrotnej rygla, mającej mniejszą bezwładność niż uwolnione nagle od siły zginającej przedramię.
Linka sterująca ruchami stawu łokciowego przechodzi przez jego korpus i wychodzi na zewnątrz w części przedramiennej. Tu koniec jej możemy wykorzystać do mechanicznego sterowania mikrcwyłącznikiem ręki elektrycznej. Jest to możliwe dzięki temu, że siła potrzebna do włączenia lub wyłączenia mikrowyłącznika jest mniejsza od siły koniecznej do odciągnięcia rygla w stawie łokciowym. Ten system sterowania mechanicznego ze źródeł poruszanych siłą mięśni, wykorzystywany do bezpośredniej kontroli ruchów w protezowym stawie łokciowym oraz do kontroli ruchów ręki zasilanej energią elektryczną, nazywamy systemem hybrydowym. Jest to nazwa zapożyczona z biologii, oznaczająca mieszańca dwóch osobników o różnych cechach.
Zaletą opisanego stawu łokciowego IOR-COTM jest prostota budowy, łatwość i płynność sterowania oraz umożliwienie jednoczesnego precyzyjnego i płynnego sterowania ruchami ręki elektrycznej za pomocą jednego i tego samego źródła .siły.
Stosując przy protezie czynnie otwieraną rękę mechaniczną lub hak czynnie otwierany, musimy korzystać z innego źródła siły, a więc przechodzimy tym samym na dwucięgłowy system sterowania. Wtedy jednak, w przypadku krótkiego kikuta ramienia, możemy napotkać trudności, wynikające z przewagi siły koniecznej do rozwarcia ręki mechanicznej lub haka nad siłą wystarczającą do odciągnięcia rygla w stawie łokciowym. Dzieje się to dlatego, że zarówno jeden, jak i drugi mechanizm ruchowy wymaga dość dużej siły, oraz drogi przesuwu linki, a jedynym źródłem w obrębie obręczy kończyny górnej, spełniającym te wymagania, jest ruch wysuwania barków do przodu i rozsuwania łopatek. Ten typ stawu łokciowego można natomiast wykorzystać przy zaopatrywaniu długich kikutów ramienia, gdzie system sterowania dwucięgłowego nie napotyka trudności z racji możliwości wykorzystania jako źródeł siły zarówno ruchu zginania ramienia, jak i wysuwania barków do przodu.
tli
Wyszukiwarka
Podobne podstrony:
209 4 Możliwości ruchów kończyny górnej Ryc. 369 Staw łokciowy; Ryc. 370 Staw
pomiary siły - 66 - Posłużono się metodą opisaną przez Pidelusa [7 ] (ryc.6 17) t.Staw łokciowy a)zg
209 2 Możliwości ruchów kończyny górnej Flexio Axis transversalis Extensio Ryc. 369 Staw łokciowy;
TRUDNOŚCI WYCHOWAWCZE Dobre wychowanie od podstaw nie jest rzeczą prostą. Dlatego też częstokroć okr
staw lokciowy 1 Ryc. 70. M. biceps brachii. a Początek: głowa długa - guzek nadpanewkowy łopatki, gł
Hyc. 72. Modularny staw łokciowy ZSO AM: u — linka sterująca, b — część ramienna ■mechanizmu z wycin
70 (165) OSTEOLOGIA 67 Ryc. 10. Łopatka (scapula). ^ Ujęcie całościowe Łopatka jes
image40 (25) / Staw łokciowy Zginanie przedramienia (ryc. 87 i ryc. 88) Sposób 1 Pw.: siad, ramię kg
WtadzeDziekan Wydziału Mechanicznego dr hab. inż. Cezary Behrendt, prof. AM Jest absolwentem Politec
MG 70 Operatory relacyjne • Dla tablicy 1-D możliwe jest stosowanie operatorów
Strona 4 z 6Polska Strona LDN mechanizmu działania LDN jest „więc co z tego?" np.: trudno jest
skanuj0002 i { j :i 1 j I I ■i9Qna; Ryc. 70. Kształty liściem i pierwszej pary listków niektórych ro
staw lokciowy ryciny copy STAW ŁOKCIOWY ( ARTICULATIO CUBITI ) torebka stawowa - błona włóknista ( c
więcej podobnych podstron