034 4
34 Sterowanie logiczne i sekwencyjne
stanowej. Działanie sterowników programowych z reguły jest oparte na obsłudze zdarzeń.
Działanie maszyny stanowej asynchronicznej przedstawimy na przykładzie alarmu domowego. Urządzenie to będzie się składać z automatu Door oraz automatu Alarm1.
Dla maszyny Door zdefiniujemy następujące zdarzenia wejściowe:
1) DoorMode: 1 -A 0 (zmiana wartości sygnału DoorMode z 1 na 0),
2) DoorMode: 0 —» / (zmiana wartości sygnału DoorMode z 0 na 1),
3) DoorSensor: 1 —>0 (zmiana wartości sygnału DoorSensor z 1 na 0),
4) DoorSensor: 0 —» / (zmiana wartości sygnału DoorSensor z 0 na 1). Zdarzenia wyjściowe tej maszyny stanowią.:
1) wysłanie komunikatu Alen On,
2) wysłanie komunikatu AlenOff'.
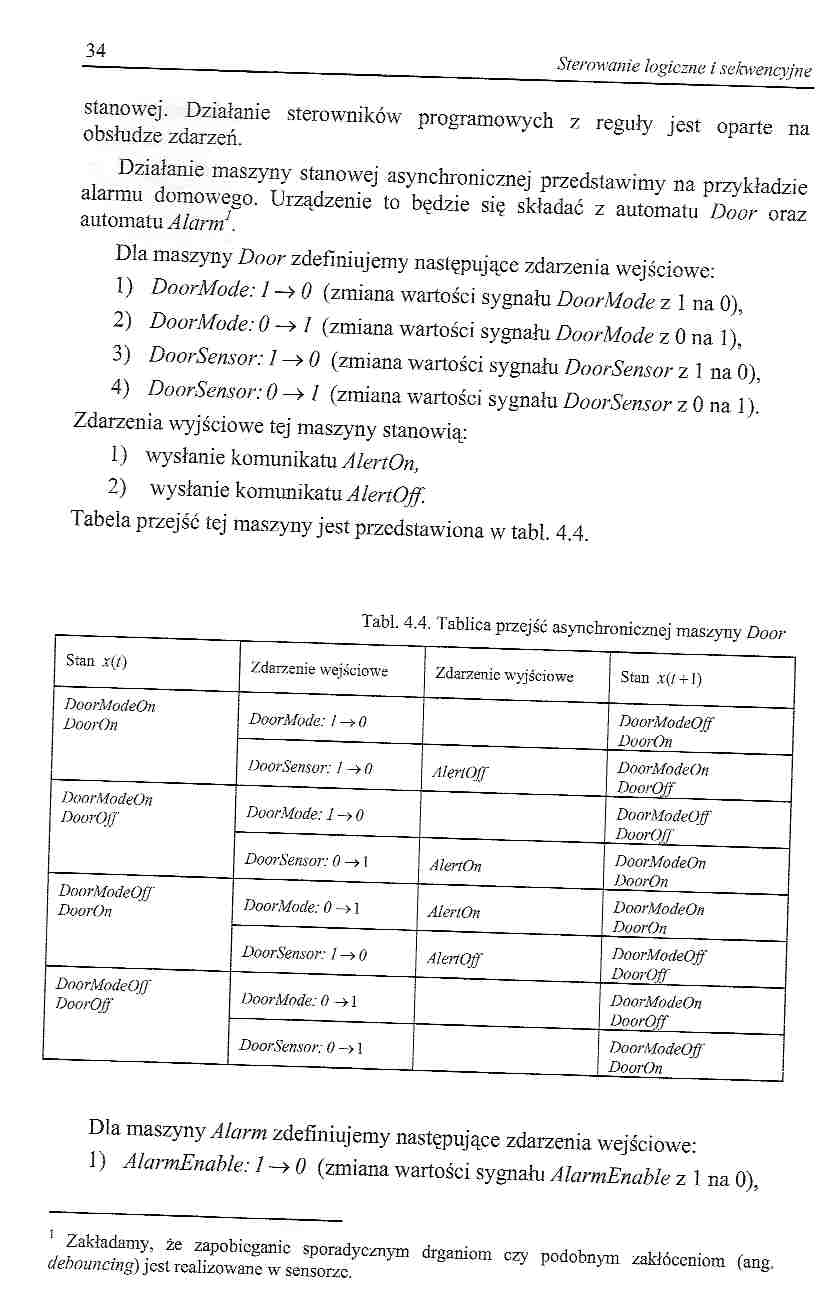
Tabela przejść tej maszyny jest przedstawiona w tabl. 4.4.
Tabl. 4.4. tablica przejść asynchronicznej maszyny Door
|
Stan x(f) |
Zdarzenie wejściowe |
Zdarzenie wyjściowe |
Stan .v</ -r 1) |
|
DoorModeOn DoorOn |
DoorMode: 1 —* 0 |
DoorModeOff DoorOn | |
|
ifOorSensor: 1 -rO |
AlenOff |
DoorModeOn DoorOff | |
|
DoorModeOn DoorOff |
DoorMode: I->0 |
DoorModeOff DoorOff | |
|
DoorSensor: 0 -> 1 |
AhsnOn |
DoorModeOn DoorOn | |
|
DoorModeOff' DoorOn |
DoorMode: 0 - > 1 |
AiertOn |
DoorModeOn DoorOn |
|
DoorSensor 1 -> 0 |
AlenOff |
DoorModeOff DoorOff | |
|
DoorModeOff DoorOff |
DoorMode: 0 |
DoorModeOn DoorOff | |
|
DoorSensor; 0 -> 1 |
DoorModeOff DoorOn |
Dla maszyny Alarm zdefiniujemy następujące zdarzenia wejściowe:
1) AlarmEnahle: 1 —>0 (zmiana wartości sygnału AlarmEnable z 1 na 0),
Zakładamy, że zapobieganie sporadycznym drganiom czy podobnym zakłóceniom fang. (lebouncing) jest realizowane w sensorze.
Wyszukiwarka
Podobne podstrony:
110 3 4.2.i. Uszczelnienia tłoka i wypornika Działanie uszczelnień tłoka i wypornika jest oparte na
Laboratorium sterowników programowalnych PLC Jest kilka kluczowych różnic pomiędzy listą instrukcji
Rys historyczny cd. [1] Sterowniki programowalne, odkąd rozwinęły się na początku lat siedemdziesiąt
skanowanie0068 [1024x768] KANBAN System sterowania produkcją KANBAN jest zorientowany na realizację
DSC00018 (18) Tranzystor unipolarny (połowy) • Działanie jest oparte na Iran sporc
CCF090613�026 W przetwornikach a/c o działaniu pośrednim napięcie wejściowe jest przetwarzane na wie
Praca Doktorska - Anna Sapińska- Wcisło Działanie sensorów piezoelektrycznych jest oparte na efekcie
i finansową oraz podejmować określone decyzje. Finansowanie działalności MFW jest oparte na kapitale
DZIAŁANIA „KÓŁ JAKOŚCI’ Grupy pracowników oparte na podstawowych jednostkach organizacji (np.
1 4 Działanie mikroskopu polaryzacyjnego jest oparte na zjawisku dwójłomności substancji, w
Obrazf7 (2) J 34 UCZENIE SIĘ JAKO AKTYWNE PRZETWARZANIE IHfOnii,,. ołówek Rycina 4.3 Zdania oparte n
_ REAGOWANIE NA DZIAŁALNOŚĆ OPERATORA Programowanie robota przemysłowego polega na nauczeniu go cykl
POWIERZCHNIA DZIAŁANIA BODŹCA Im większa jest powierzchnia, na którą działa bodziec, tym silniejsza
(1194) Powierzchnia działania bodźca Im większa jest powierzchnia na którą działa bodziec, tym reakc
030 3 30 Sterowanie logiczne i sekwencyjne Funkcję przejść stanów zapisuje się przez podanie tablicy
więcej podobnych podstron