15 2
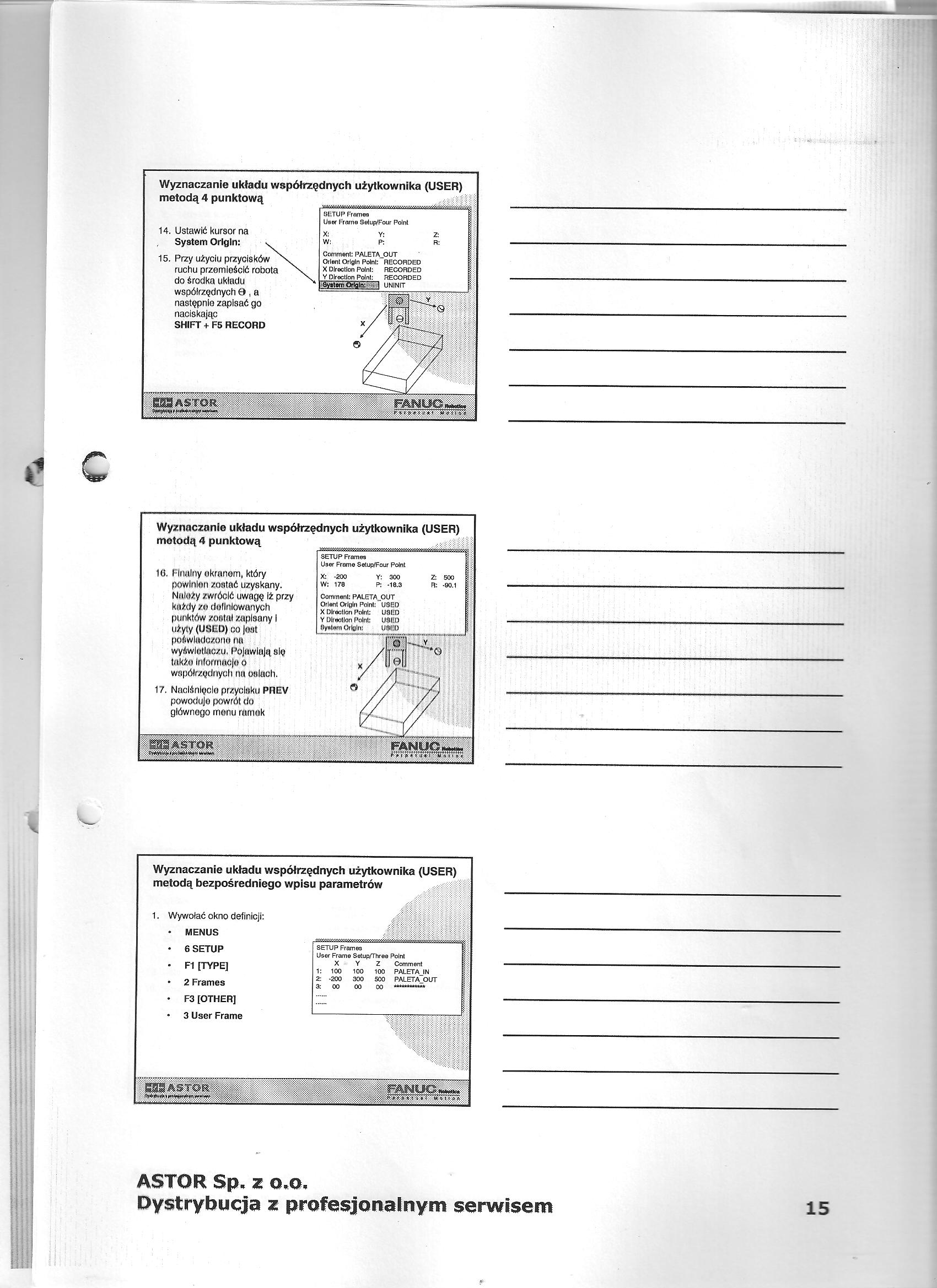
14. Ustawić kursor na System Orlgln:
15. Przy użyciu przycisków ruchu przemieścić robota do środka układu współrzędnych 0, a następnie zapisać go naciskając
SHIFT + F5 RECORD
SETUP trumno
Uttor l:rnm(i Sułup/Four Point
Commtnl: PALETA OUT Orient Orlgln Point: RECORDED X Dlroctlon Point: RECORDED
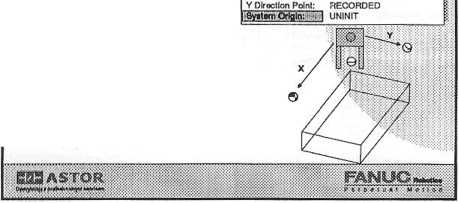

10. Finalny ekranom, który powinien zostać uzyskany. Należy zwrócić uwagę iż przy każdy ze definiowanych punktów został zapisany i użyty (USED) co |09t poświadczone na wyświetlaczu. Pojawiają się także informacjo o współrzędnych rm calach.
SETUP Frames
Uaor Frame Setup/Four Point
W: 178 P: -18.3
Commont: PALETA OUT Orlont Orlgln Point: USED X Dlroctlon Point: USED
Y Dlroctlon Point: USED
Itynlom Orlgln: USED
17. Naciśnięcia przycisku PREV powoduje powrót do głównogo menu rnrnok
|
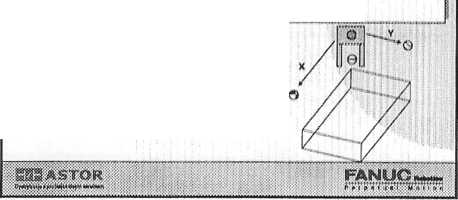
Wyznaczanie układu współrzędnych użytkownika (USER) | ||
|
metodą bezpośredniego wpisu parametrów | ||
|
1. Wywołać okno definicji: |
. • ■ i"<* ■ i; i: | |
|
• MENUS | ||
|
• 6 SETUP |
SETUP Frames | |
|
• F1 [TYPE] |
X Y Z Comment 1: 100 100 100 PALETA IN | |
|
• 2 Frames |
2: -200 300 500 PALETA OUT 3: 00 00 00 ***■»*"»»*» |
i |
|
• F3 [OTHER] | ||
|
• 3 User Frame | ||
|
*v • • | ||

15
Wyszukiwarka
Podobne podstrony:
Wyznaczanie układu współrzędnych narzędzia (TOOL) metodą 3 punktową 10. Ustawić
26 2 Wyznaczanie układu współrzędnych narzędzia (TOOL) metodą bezpośredniego wpisu parametrów 6.
06 2 Wyznaczanie układu współrzędnych JGFRM metodą 3 punktową 12. Ustawić kursor
Metoda różnicowa umożliwia wyznaczenie różnic współrzędnych dwóch punktów, w których są ustawiane
SL274256 Metoda punktowa Za udziec 25 pkt Za grzbiet 25 pkt Za łopatkę 15 pkt Za szyję 10
zad 8 roz 7. Wyznaczyć metodą punktów przebicia przekrój ostrosłupa ukośnego płaszczyzną a zadaną śl
CCI20100414�012 3. Konstruowanie zęba koła zębatego o zarysie przesuniętym; ewolwenta wyznaczana met
Wyznacz równanie prostej przechodzącej przez punkt (1,1), która wraz z osiami układu współrzędnych
Wyznaczenie wartości parametrów wytrzymałościowych w oparciu o aproksymację punktów pomiarowych Meto
3.4.1 Obliczenie terenowych współrzędnych pomierzonych na zdjęciach punktów Aby wyznaczyć położenie
slajd40 (13) Wyznaczyć prawdziwą wielkość odcinka AB metodą transformacji układu odniesien
ScanImage002 27. Metoda punktu środkowego wyznaczenia naprężeń w podłożu. 28. Metoda punktów narożny
Obrót układu dookoła punktu O o kąt skierowany OBRÓT UKŁADU WSPÓŁRZĘDNYCH DOOKOŁA PUNKTU "O&quo
więcej podobnych podstron