1tom214
430
8. AUTOMATYKA I ROBOTYKA
Jeżeli regulator diagonalny nie zapewnia dostatecznej jakości regulacji, to nal • zastosować regulator niediagonalny, ale taki, przy którym układ zamknięty jest odnrz nięty, tzn. dający URA, w którym transmitancja układu otwartego jest diaeona. Projektowanie regulatora odprzęgającego jest proste w przypadku minimalnofazow^ obiektu regulacji. Regulator w takim przypadku składa się z 2 części: diaeonafn^ i niediagonalnej — będącej odwrotnością obiektu Gob‘(s) uzupełnionej czynnikam® 1/(1 +sTi}) w celu osiągnięcia realizowalności regulatora. Stałe T;J powinny być współ* mierne ze stałymi czasowymi obiektu. Elementy części diagonalnej regulatora projektuje się standardowo dla kolejnych obwodów regulacji, traktując je jako samodzielne obwodv [8.16],
W przypadku obiektu nieminimalnofazowego regulator odprzęgający projektuje się zakładając niezerowe transmitancje na przekątnej transmitancji macierzowej układu zamkniętego. Pozostałe elementy tej macierzy przyrównuje się do zera. Rozwiązania otrzymanego układu równań z q~ niewiadomymi są elementami transmitancji macierzowej regulatora odprzęgającego. W przypadku trudności z ich realizowalnością należy zmodyfikować transmitancję układu zamkniętego i ponownie wyznaczyć transmitancje regulatora wielowymiarowego.
8.6.2. Regulatory optymalne
Regulatorem optymalnym jest nazywany regulator minimalizujący — w przestrzeni sterowań dopuszczalnych 9lu. ueS, — wybrany wskaźnik jakości regulacji, np. czas regulacji, całkę z kwadratu uchybu, całkę z modułu uchybu, całkę z kwadratu zmiennych stanu i sterowania itp. Ogólnie, wskaźnik jakości składa się z dwu części: części określającej koszt działań dynamicznych (reprezentuje ją całka) i części określającej koszt działań statycznych,
(8.30)
J(u,x,t) = jF(x,u,t)dt+G(x,u,t)lo
gdzie: t — czas; 0 i ik — chwila początkowi i końcowa; u ix — zmienne sterowania i stanu. Część statyczna jest istotna, np. przy optymalizacji napędu synchronicznego, gdzie chodzi nic tylko o odpowiednią dynamikę, ale i o optymalną statykę (minimum mocy).
Funkcjonał jakości J i równania stanu procesu sterowanego określają zadanie optymalizacji regulatora. Zadania takie można rozwiązać metodami: rachunku wariacyjnego, programowania dynamicznego Bcllmana (zasada optymalności) lub za pomocą zasady maksimum Pontriagina [8.3; 8.6; 8.12]. W projektowaniu regulatorów optymalnych najczęściej wykorzystuje się zasadę maksimum Pontriagina lub zasadę optymalności.
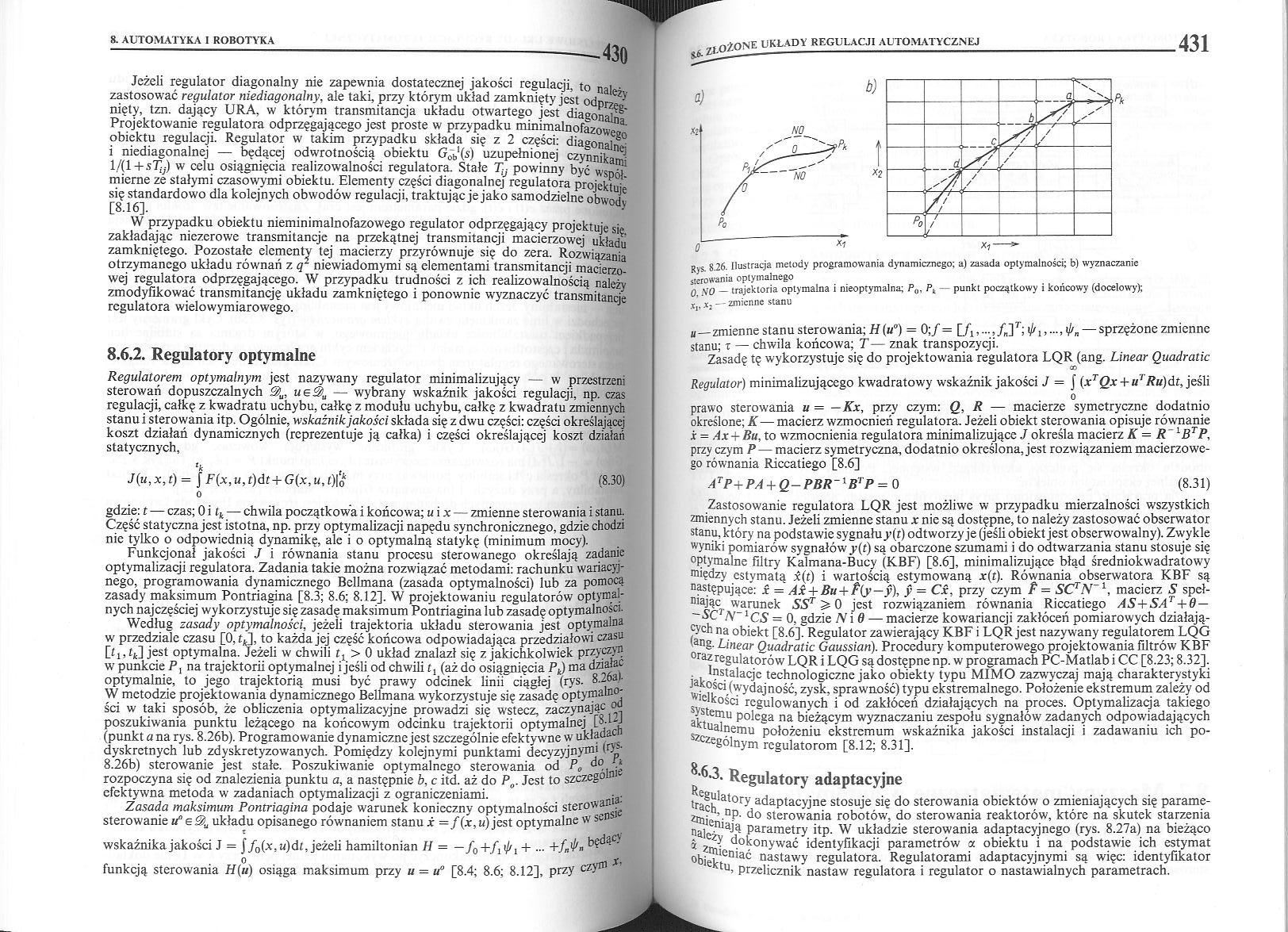
Według zasady optymalności, jeżeli trajektoria układu sterowania jest optymalna w przedziale czasu [0, tt], to każda jej część końcowa odpowiadająca przedziałowi czasu [t i, ft] jest optymalna. Jeżeli w chwili tj > 0 układ znalazł się z jakichkolwiek przyczyn w' punkcie P, na trajektorii optymalnej i jeśli od chwili t, (aż do osiągnięcia PJ ma działać optymalnie, to jego trajektorią musi być prawy odcinek linii ciągłej (rys. 8.2oaj-W metodzie projektowania dynamicznego Bellmana wykorzystuje się zasadę optymalności w taki sposób, że obliczenia optymalizacyjne prowadzi się wstecz, zaczynając poszukiwania punktu leżącego na końcowym odcinku trajektorii optymalnej [o-1J (punkt a na rys. 8.26b). Programowanie dynamiczne jest szczególnie efektywne w układa dyskretnych lub zdyskretyzowanych. Pomiędzy kolejnymi punktami decyzyjnym1 lry 8.26b) sterowanie jest stałe. Poszukiwanie optymalnego sterowania od P„ do .* rozpoczyna się od znalezienia punktu a, a następnie b, c itd. aż do P„. Jest to szczegom efektywna metoda w zadaniach optymalizacji z ograniczeniami. ja:
Zasada maksimum Pontriagina podaje warunek konieczny optymalności sterów* sterowanie tf e układu opisanego równaniem stanu i - f(x, u) jest optymalne w sc
wskaźnikajakości J = J/0(x,«)dt, jeżeli hamiltonian H = — f0+fl\pi + ... +/„'/'n
funkcją sterowania H(u) osiąga maksimum przy u = u° [8.4; 8.6; 8.12], przy czym i
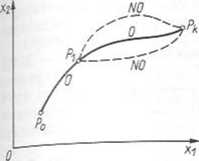

Rys 8.26- Ilustracja metody programowania dynamicznego; a) zasada optymalności; b) wyznaczanie sterowania optymalnego
0 tfO _ trajektoria optymalna i nieoptymalna; P0, Pk - punkt początkowy i końcowy (docelowy); .t,, x2 - zmienne stanu
a—zmienne stanu sterowania; H(«“) = 0;/ = >•••></'„ — sprzężone zmienne
stanu; t — chwila końcowa; T — znak transpozycji.
Zasadę tę wykorzystuje się do projektowania regulatora LQR (ang. Linear Quadratic
00
Regulator) minimalizującego kwadratowy wskaźnik jakości J = j (xTQx + ul Ru)dt, jeśli
o
prawo sterowania u = — Kx, przy czym: Q, R — macierze symetryczne dodatnio określone; K—macierz wzmocnień regulatora. Jeżeli obiekt sterowania opisuje równanie x = Ax + Bu, to wzmocnienia regulatora minimalizujące J określa macierz K = R~ 1BTP, przy czym P—macierz symetryczna, dodatnio określona, jest rozwiązaniem macierzowego równania Riccatiego [8.6]
ATP+PA + Q-PBR-'B’ P = 0 (8.31)
Zastosowanie regulatora LQR jest możliwe w przypadku mierzalności wszystkich zmiennych stanu. Jeżeli zmienne stanu x nie są dostępne, to należy zastosować obserwator stanu, który na podstawie sygnału >’(r) odtworzyje (jeśli obiekt jest obscrwowalny). Zwykle wyniki pomiarów sygnałów y(t) są obarczone szumami i do odtwarzania stanu stosuje się optymalne filtry Kalmana-Bucy (KBF) [8.6], minimalizujące błąd średniokwadratowy między estymatą x(t) i wartością estymowaną jc(f). Równania obserwatora KBF są następujące: x = Ax + Bu + P(y—y), y = Cx, przy czym P = SC7W1, macierz S spełzając warunek SST > 0 jest rozwiązaniem równania Riccatiego AS+SAT+8— ~SC A' 'CA = 0, gdzie 1\i 6 — macierze kowariancji zakłóceń pomiarowych działających na obiekt [8.6]. Regulator zawierający KBF i LQR jest nazywany regulatorem LQG (ang. Linear Quadratic Gaussian). Procedury komputerowego projektowania filtrów KBF oraz regulatorów LQR i LQG są dostępne np. w programach PC-Matlab i CC [8.23; 8.32]. ■ . Instalacje technologiczne jako obiekty typu MIMO zazwyczaj mają charakterystyki [.^(wydajność, zysk, sprawność) typu ekstremalnego. Położenie ekstremum zależy od sv!c *°ści regulowanych i od zakłóceń działających na proces. Optymalizacja takiego akt iU P°*e§a na bieżącym wyznaczaniu zespołu sygnałów zadanych odpowiadających ualnemu położeniu ekstremum wskaźnika jakości instalacji i zadawaniu ich powolnym regulatorom [8.12; 8.31],
^•3. Regulatory adaptacyjne
lrach at°ry adaPtacyjne stosuje się do sterowania obiektów o zmieniających się parame-z^i .nP- do sterowania robotów, do sterowania reaktorów, które na skutek starzenia *£>»« parametry itp. W układzie sterowania adaptacyjnego (rys. 8.27a) na bieżąco 5 pokonywać identyfikacji parametrów a obiektu i na podstawie ich estymat obieicleDlad nastawy regulatora. Regulatorami adaptacyjnymi są więc: identyfikator tu> przelicznik nastaw regulatora i regulator o nastawialnych parametrach.
Wyszukiwarka
Podobne podstrony:
1tom211 -424 8. AUTOMATYKA I ROBOTYKA Rys. 8.21. Wskaźniki jakości regulacji; prze regulowanie * = A
1tom216 -434 8. AUTOMATYKA I ROBOTYKA Symulowany układ, np. regulator PI z nasyceniem (rys 8.28a), n
1tom205 8. AUTOMATYKA 1 ROBOTYKA412 Współczesne regulatory impulsowe są mikroprocesorowe (rys. 8.11)
1tom218 -438 8. automatyka i robotyka Rys. 8.32. Serwomechanizmy robotów a) serwom
Kordowicz-Sot A.: Automatyka i robotyka. Układy regulacji automatycznej. WSiP, War
Problemy ergonomiczne Jeżeli przy konstruowaniu nie są w dostatecznym stopniu uwzględnione
Slajd6 8 Zadanie 6. Kasia kupuje wyłącznie chleb i pomidory. Jeżeli wyda na nie cały swój tygodniowy
74276 strona 4 (2) Załącznik 1.Opis układu wzmacniacza dwustopniowego Jeżeli wzmacniacz wielostopnio
Jeżeli powyższy znak nie jest podany przy liczbie to zamiast w milimetrach wartość przyjmowana jest
elementy prawa 2 ^ końcowym Jeżeli rozporządzenie samo nie określa daty wejścia w życie, to wchodzi
najmniejszy. Jeżeli w tym okresie nie zastosuje się leczenia przeciwbólowego to pozycja przeciwbólow
więcej podobnych podstron