1tom211
-424
8. AUTOMATYKA I ROBOTYKA

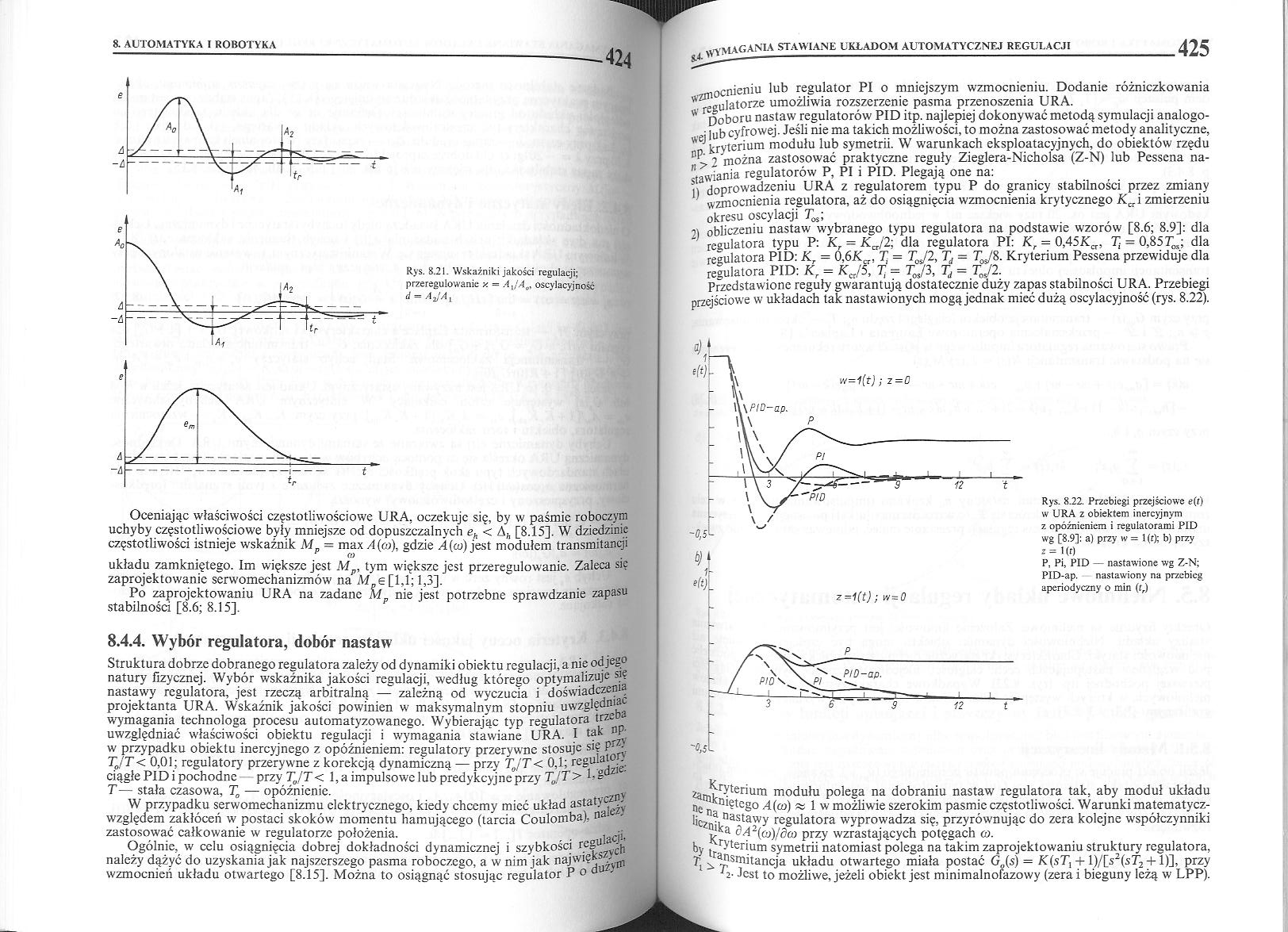
Rys. 8.21. Wskaźniki jakości regulacji; prze regulowanie * = AJA0> oscylacyjność
d = A jjA j

Oceniając właściwości częstotliwościowe URA, oczekuje się, by w paśmie roboczym uchyby częstotliwościowe były mniejsze od dopuszczalnych eh < Ah [8.15]. W dziedzinie
częstotliwości istnieje wskaźnik M = max/!(«), gdzie A (co) jest modułem transmitancji
1 <0
układu zamkniętego. Im większe jest Mp, tym większe jest przeregulowanic. Zaleca się zaprojektowanie serwomechanizmów na Me [1,1; 1,3].
Po zaprojektowaniu URA na zadane M nie jest potrzebne sprawdzanie zapasu stabilności [8.6; 8.15].
8.4.4. Wybór regulatora, dobór nastaw
Struktura dobrze dobranego regulatora zależy od dynamiki obiektu regulacji, a nie od jego natury fizycznej. Wybór wskaźnika jakości regulacji, według którego optymalizuje si nastawy regulatora, jest rzeczą arbitralną — zależną od wyczucia i doświadczeń projektanta URA. Wskaźnik jakości powinien w maksymalnym stopniu uwzględni wymagania technologa procesu automatyzowanego. Wybierając typ regulatora trze uwzględniać właściwości obiektu regulacji i wymagania stawiane URA. I ta{" 'v w przypadku obiektu inercyjnego z opóźnieniem: regulatory przerywne stosuje się P TJT< 0,01; regulatory' przerywne z korekcją dynamiczną — przy TJT< 0,1; regula■ ciągłe PID i pochodne przyTJT< 1, a impulsowe lub predykcyjne przy TJT > U8 T— stała czasowa, T„ — opóźnienie. zlly
W przypadku serwomechanizmu elektrycznego, kiedy chcemy mieć układ asta-a|eży względem zakłóceń w postaci skoków momentu hamującego (tarcia Coulomba), n zastosować całkowanie w regulatorze położenia. .gcji'
Ogólnie, w celu osiągnięcia dobrej dokładności dynamicznej i szybkości rcf,szvCh należy dążyć do uzyskania jak najszerszego pasma roboczego, a w nim jak najwię^U'vni wzmocnień układu otwartego [8.15]. Można to osiągnąć stosując regulator P 0
SMAGANIA STAWIANE UKŁADOM AUTOMATYCZNEJ REGULACJI
g.4. ________
mocnieniu lub regulator PI o mniejszym wzmocnieniu. Dodanie różniczkowania emulatorze umożliwia rozszerzenie pasma przenoszenia URA.
JUU '-‘J1 -> ’ —— — ---- --------- ---- ——» — — —-------- —-------^ ------—s-----z
" Kryterium modułu lub symetrii. W warunkach eksploatacyjnych, do obiektów rzędu
^ 7 można zastosować praktyczne reguły Ziegler" ,ry xn K-u 10--------
stawiania regulatorów P, PI i PID. Plegają one na:
" rp0boru nastaw regulatorów PID itp. najlepiej dokonywać metodą symulacji analogo-■ ]U|, cyfrowej. Jeśli nie ma takich możliwości, to można zastosować metody analityczne,
1)
doprowadzeniu URA z regulatorem typu P do granicy stabilności przez zmiany wzmocnienia regulatora, aż do osiągnięcia wzmocnienia krytycznego K„ i zmierzeniu okresu oscylacji Tx;
2)
obliczeniu nastaw wybranego typu regulatora na podstawie wzorow [8.6; 8.9]: dla regulatora typu P: Kr = KJ2; dla regulatora PI: Kr = 0,45Kcr, 7] = 0,85 Tos; dla regulatora PID: fC, = 0,6K„. 7] = TJ2, Td - TJ8. Kryterium Pessena przewiduje dla regulatora PID: Kr = KJ5, T, = TJ3, Td = TJ2.
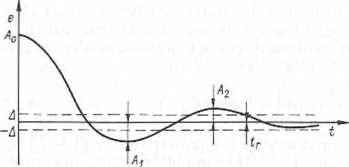
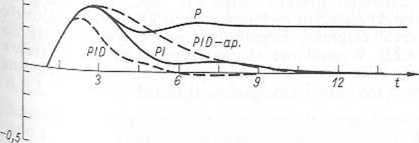
Przedstawione reguły gwarantują dostatecznie duży zapas stabilności URA. Przebiegi przejściowe w układach tak nastawionych mogą jednak mieć dużą oscylacyjność (rys. 8.22).

Rys. 8.22. Przebiegi przejściowe e{t) w URA z obiektem inercyjnym z opóźnieniem i regulatorami PID wg [8.9]: a) przy w = 1 (r); b) przy
2 = Kr)
P, Pi, PID — nastawione wg Z-N; PID-ap. nastawiony na przebieg aperiodyczny o min (tr)
"
Ir ™ \yj)/uw [nz.y wziasrającyui puięgacai uj.
by !;r-vterium symetrii natomiast polega na takim zaprojektowaniu struktury regulatora.
— ‘ 1,J *------*----—---r* try/_TP . i\/r„2/„Tn , 1 \n ——
Kryterium modułu polega na dobraniu nastaw' regulatora tak, aby moduł układu ne dętego A(co) « 1 w możliwie szerokim paśmie częstotliwości. Warunki matematycz-li pustawy regulatora wyprowadza się, przyrównując do zera kolejne współczynniki k-..a 2(m)/3m przy wyrastających potęgach ca.
Witancja układu otwartego miała postać G„(s) = K(sTt + l)/[s1(sT2 + l)], przy
Jest to możliwe, jeżeli obiekt jest minimalnofazowy (zera i bieguny leżą w LPP).
Wyszukiwarka
Podobne podstrony:
1tom218 -438 8. automatyka i robotyka Rys. 8.32. Serwomechanizmy robotów a) serwom
1tom214 430 8. AUTOMATYKA I ROBOTYKA Jeżeli regulator diagonalny nie zapewnia dostatecznej jakości r
1tom216 -434 8. AUTOMATYKA I ROBOTYKA Symulowany układ, np. regulator PI z nasyceniem (rys 8.28a), n
DSC00533 (6) 1 3 Rys. 9.21. Schemat ideowy regulacji temperatury w pomieszczeniu kabinie, przestrzen
41 (383) o Im Rys. 21.8. Statyczna charakterystyka regulacji kaskady na stałą moc waniu tej charakte
Pomiary Automatyka Robotyka 9/2008 rys. 3a. Ponadto dla realizacji ruchu w stopniu swo- obrotnicę wz
Wymagania stawiane układom automatyki - całkowe wskaźniki regulacji Miarą jakości regulacji moż
Rys. 1.2: Rozkład podziałów na : Automatyka i robotyka
Bielsko-Biała, 21.10.2014 Prof. dr hab. inż. Jan Szadkowski Em. prof. zw. ATH AUTOMATYZACJA I ROBOTY
1tom203 -408 8. AUTOMATYKA I ROBOTYKA8.2. Elementy układów regulacji W URA (rys. 8.5) — oprócz urząd
1tom205 8. AUTOMATYKA 1 ROBOTYKA412 Współczesne regulatory impulsowe są mikroprocesorowe (rys. 8.11)
1tom209 8. AUTOMATYKA I ROBOTYKA 420 Rys. 8.17. Identyfikacja metodą odpowiedzi skokowej: a) obiektó
1tom210 8. AUTOMATYKA 1 ROBOTYKA422 wymierną i z łatwością można zastosować kryterium Hurwitza. Kryt
1tom212 8. AUTOMATYKA I ROBOTYKA-426 Logarytmiczna charakterystyka fazy takiego układu otwartego jes
1tom213 8. AUTOMATYKA 1 ROBOTYKA 428 Ylys. &.15. Mtałiza działania nieliniowego V1R drugiego rz
1tom215 8. AUTOMATYKA I ROBOTYKA -432 Ze względu na dużą liczbę obliczeń wykonywanych przy wyznaczan
1tom217 8. AUTOMATYKA I ROBOTYKA^436 ochronnych, kontrola wymiarów, montaż, malowanie, a nawet skład
więcej podobnych podstron