1tom212
8. AUTOMATYKA I ROBOTYKA
-426
Logarytmiczna charakterystyka fazy takiego układu otwartego jest symetryczna w dem pulsacji cog = (7j T2)~ 1 . Symetrię charakterystyki logarytmicznej modułu uk^Jf otwartego osiąga się, nastawiając wzmocnienie K = I /(7j v T, T2). Zapas fazy w y zaprojektowanym URA zależy od ilorazu a = TJT2. Przy z = 4, 8" 10, 20 i 50 zanas r Acp wynosi odpowiednio: 37c, 51c, 55°, 65° i 74°, a Mp wynosi: 1,682, 1,33, 1,275 1 pi i 1,105. Wartość Mp można zmniejszyć przez nieznaczne zwiększenie wzmocnienia'
Przy projektowaniu kaskadowych URA najpierw dobiera się regulator wewnętrzny Po jego nastawieniu dobiera się regulator zewnętrzny. Tłumienie zakłóceń w kaskadowym URA jest ok. 20 razy większe niż w jednoobwodowym URA.
Regulator impulsowy można dobrać tak, by do stanu statycznego dochodził w skończonym czasie t = pTs [8.1; 8.4], Tak reagujący regulator na skok sygnału w(t) powinien mieć transmitancję impulsową R(z) = jVf0(z)/[L„(l)z,’-I0(z)], obliczaną na podstawie transmitancji impulsowej obiektu z ekstrapolatorem G„(z) = i0(z)/Afo(z),
G0{z) = ^[^-'[(1 -c-*T-)GJs)M,-kTrI
przy czym Gob(s) — transmitancja obiektu (ciągłego) rzędu n0; T — okres impulsowania: p 3= n0; 2C i Sć — przekształcenia operatorowe Laurenta i Laplace’a [8.1].
Prawo sterowania regulatora impulsowego w postaci wzoru rekurencyjnego wyznacza się na podstawie transmitancji R(z) = Lr(z)/Afr(z)
= lgmre(k + mr-nr) + gm,-le(k + mr + nr-l)+ ... +g0e(k-nr)]~
- Om- -1 u(k -1)+hnr _ 2 u(k - 2)+ ... + h2 u(k - nr +1)+h0u(k - nr)]/h„, przy czym g-, i h::
mr nr
Lr(z) = X Giz‘; Af,(z) = £ h,ć
i = O i = O
Przy p = n„, URA osiąga stan ustalony n0 krokami (impulsowaniami). Jeśli w celu zmniejszenia czasu regulacji skróci się 7], to wzrośnie max(|u(k)|) i po osiągnięciu nasycenia urządzenia wykonawczego czas regulacji przestanie maleć, ponieważ samorzutnie zwiększy się liczba kroków.
8.5. Nieliniowe układy regulacji automatycznej
Obiekty fizyczne są nieliniowe. Założenie liniowości jest przyjmowane dla ułatwieniu analizy układu. Nieliniowości dynamiki obiektu mogą być częściej pominięte niz nieliniowości statyki. Charakterystyki statyczne nieliniowych obiektów można pod/jcuę pod względem następujących cech: ciągłości, niejednoznaczności, symetrii, ciąg^sci pierwszej pochodnej itp. (rys. 8.23). Wypadkowe charakterystyki statyczne układ®, nieliniowych, w których występuje kilka członów nieliniowych, wyznacza się metoda graficznymi [8.1; 8.3; 8.7].
8.5.1. Metody linearyzacji
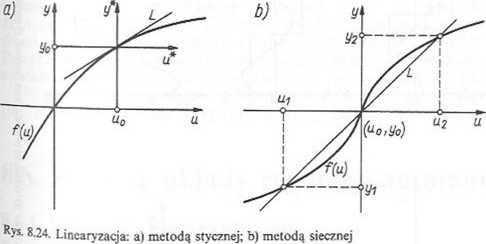
Jeżeli obiekt pracuje w otoczeniu punktu nominalnego (up,y„), zwanego punkteni a charakterystyka statyczna y = f(u) w tym otoczeniu jest jednoznaczna i gł?dkiu można ją zlinearyzować graficznie metodą stycznej L (rys. 8.24a) lub analityc rozwijającf(u) w szereg Taylora w otoczeniu punktu (u„, y0) i odrzucając nieliniowa cz rozwinięcia
df(u)
du

+/(«„) = k(u-u0)+y„
y(u) = (u-u0)
Po przesunięciu początku układu współrzędnych do punktu pracy, równanie stycznej Postać y*(u*) = ku*. Przy większych odchyleniach stosuje się metodę siecznej (rys. °.24b).
8-5.2. Metody funkcji opisującej i płaszczyzny fazowej, cykle graniczne
^żeli obiekt nieliniowy jest dynamiczny albo współpracuje z blokiem liniowym dynamicz-do \ należ>' zbadać zagadnienie stabilności oraz ocenić zapasy stabilności URA, to y2°dnc i skuteczne jest zastosowanie metody funkcji opisującej pod warunkiem, że część harrn"1 2 3 jest filtrem dolnoprzepustowym [8.1; 8.3; 8.12]. Jest to metoda linearyzacji 'fonicznej. Funkcja opisująca
JU,(o) = [B(A,o)+iC(A, co)]/A gdzie
1 2*
J s i n (eof) y (/I, o t) d (ca /), u = Asinwf,
Rys. S.23. Przykłady charaktery51)* nieliniowych: a) nasycenie; b) strefa martwa; c) luz; d) przekaźnik dwupoloźeuiowy z histcrezą; e) tarcie (suche+lepkie)
C = — J cos(t»f) y(A,<ot)d(a)t)
K o
Wyszukiwarka
Podobne podstrony:
1tom210 8. AUTOMATYKA 1 ROBOTYKA422 wymierną i z łatwością można zastosować kryterium Hurwitza. Kryt
1tom213 8. AUTOMATYKA 1 ROBOTYKA 428 Ylys. &.15. Mtałiza działania nieliniowego V1R drugiego rz
1tom215 8. AUTOMATYKA I ROBOTYKA -432 Ze względu na dużą liczbę obliczeń wykonywanych przy wyznaczan
1tom217 8. AUTOMATYKA I ROBOTYKA^436 ochronnych, kontrola wymiarów, montaż, malowanie, a nawet skład
1tom219 8. AUTOMATYKA 1 ROBOTYKA440 Około 80% chwytaków ma napęd pneumatyczny. Wynika to z prostoty
klsti118 139 poszczególnych gospodarstw. Powodem takiego układu ogrodów jest. oczywiście dążność do
slide! Roboty bramowe Roboty bramowe są charakterystyczne dla elastycznej automatyzacji jednostanowi
ccf20110204�000 www przeklej pl 07.02.2011 Egzamin poprawkowy z Automatyki i Robotyki 1.
III. Kierunki kształcenia1. Automatyka i robotyka1.1. Ogólna charakterystyka
2011 12 19#;00;403 dla w < ^ dla u > ^ Charakterystyki logarytmiczne amplitudy I fazy dla nasz
2011 12 19 ;53;592 Charakterystyki logarytmiczne amplitudy I fazy dla naszego przypadku wygenerowana
1tom208 8. AUTOMATYKA I ROBOTYKA418 amplitudowo-fazowe (a-i) 2(P)(8.10). Charakterystyka Lm( co) ma
1tom211 -424 8. AUTOMATYKA I ROBOTYKA Rys. 8.21. Wskaźniki jakości regulacji; prze regulowanie * = A
1tom214 430 8. AUTOMATYKA I ROBOTYKA Jeżeli regulator diagonalny nie zapewnia dostatecznej jakości r
1tom216 -434 8. AUTOMATYKA I ROBOTYKA Symulowany układ, np. regulator PI z nasyceniem (rys 8.28a), n
1tom218 -438 8. automatyka i robotyka Rys. 8.32. Serwomechanizmy robotów a) serwom
Logarytmiczna charakterystyka modułu i fazy badanego członu Clirtkmpt
więcej podobnych podstron