1tom210
8. AUTOMATYKA 1 ROBOTYKA
422
wymierną i z łatwością można zastosować kryterium Hurwitza. Kryterium Michaiłów zastosowano dla zilustrowania jego działania. Warunek stabilności otrzymany z ^rv,a rium Hurwitza ma postać a, > 2. Zatem przy al = 3 układ jest stabilny, a przy a. i al=2 — niestabilny. Hodografy wektora M(jco) = H-a1s+s2+2s2| j = /?(<»)+j/(w), R(to) = 1 —tu2, I(o) = a>(at—2ar), wyznaczone numerycznie dfa tvci, trzech przypadków, potwierdzają to. ' 11
Zbadano metodą Michajłowa stabilność układu o transmitancji G(s) = 2exp(—3sv /[exp(—3s)+s(a,+s+2s2)], przy o, = 1, 2 i 3. Wielomian charakterystyczny Afjjcyjil = [cos(3m)—co2] +j[©(a1—2co2)—sin(3co)]. Warunek Michajłowa jest spełniony jedyni przy a, = 3 (blisko granicy niestabilności) (rys. 8.18b). W pozostałych przypadkach układ jest niestabilny.
Jeżeli wielomian charakterystyczny układu zamkniętego (UZ) nie jest znany, a jest wyznaczona eksperymentalnie charakterystyka a-f układu otwartego (UO), to stabilność można zbadać metodą Nyąuista [8.1; 8.2; 8.6; 8.11; 8.31], Kryterium Nyąuista jest stosowane praktycznie w przypadkach, gdy UO jest stabilny [8.1; 8.2]. W przypadku niestabilności UO, do zbadania stabilności UZ byłaby niezbędna znajomość liczby biegunów UO powodujących tę niestabilność.
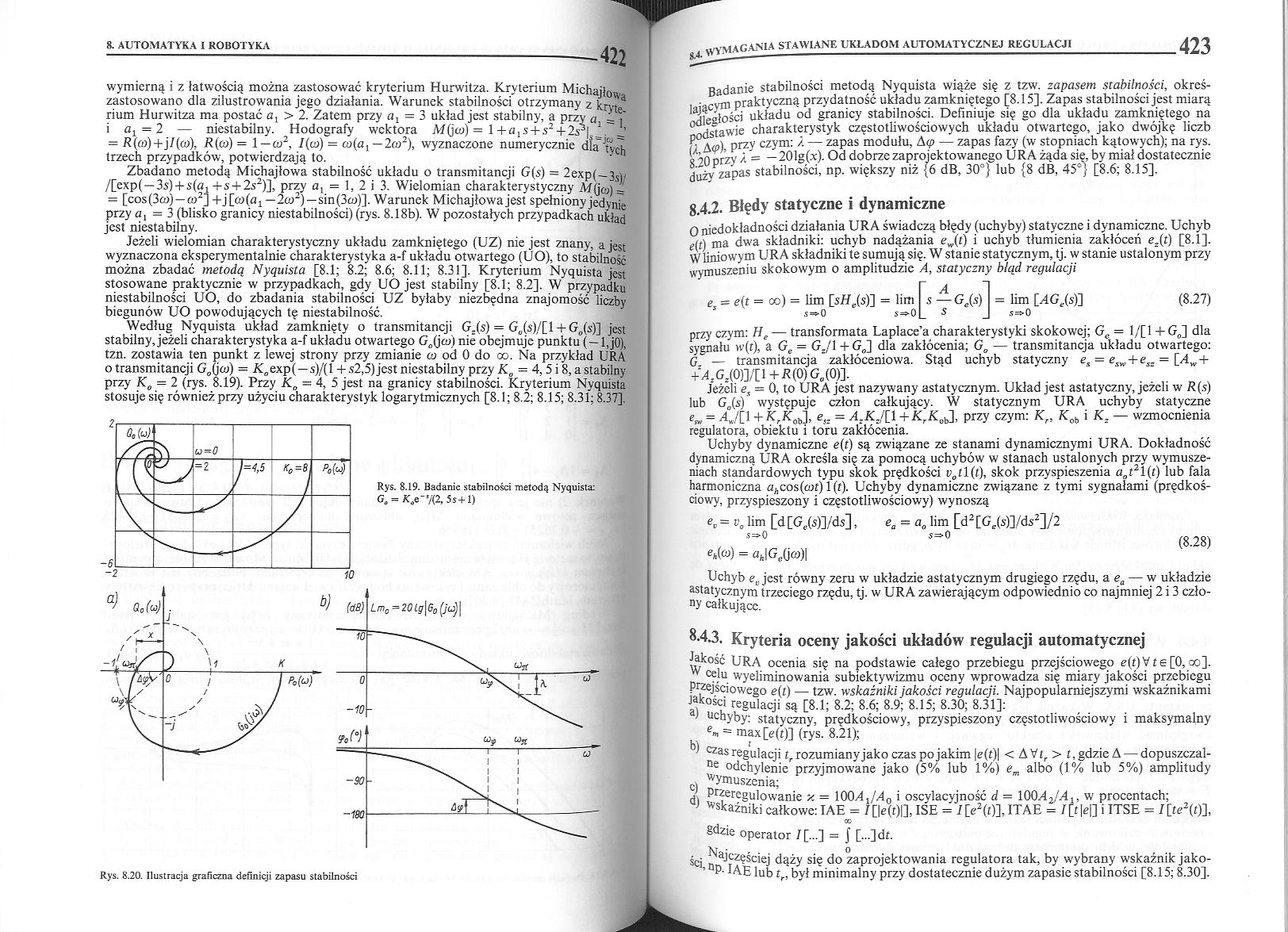
Według Nyąuista układ zamknięty o transmitancji G.(s) = G0(s),/[1 + G0(s)] jest stabilny, jeżeli charakterystyka a-f układu otwartego G„(jco) nie obejmuje punktu (— 1, jO), tzn. zostawia ten punkt z lewej strony przy zmianie co od 0 do oo. Na przykład URA o transmitancji G„(jtu) = K„exp(—s)/(l + s2,5) jest niestabilny przy K0 = 4, 5 i 8, a stabilny przy K0 = 2 (rys. 8.19). Przy K„ = 4, 5 jest na granicy stabilności. Kryterium Nyąuista stosuje się również przy użyciu charakterystyk logarytmicznych [8.1; 8.2; 8.15; 8.31: 8.37]
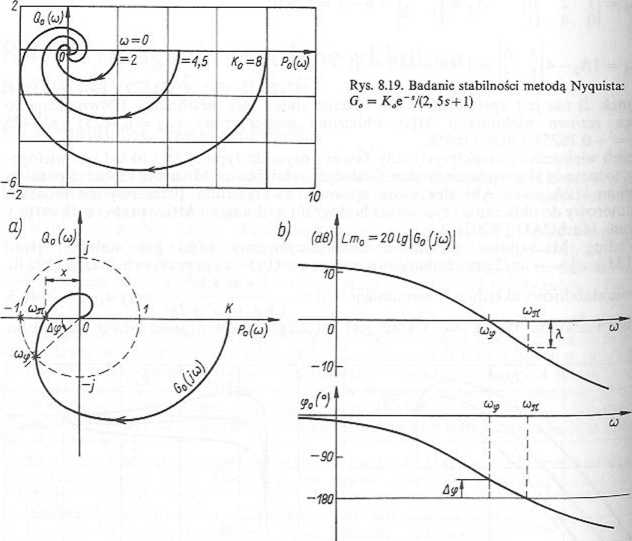
Rys. 8.20. Ilustracja graficzna definicji zapasu stabilności
Badanie stabilności metodą Nyąuista wiąże się z tzw. zapasem stabilności, okreś-• cvin praktyczną przydatność układu zamkniętego [8.15]. Zapas stabilności jest miarą Uległości układu od granicy stabilności. Definiuje się go dla układu zamkniętego na dstawie charakterystyk częstotliwościowych układu otwartego, jako dwójkę liczb r\o) przy czym: /. — zapas modułu, A<p — zapas fazy (w stopniach kątowych); na rys. lonnrzv ż = -201g(.x). Od dobrze zaprojektowanego URA żąda się, by miał dostatecznie duży zapas stabilności, np. większy niż {6 dB, 30°} lub {8 dB, 45°} [8.6; 8.15].
8.4.2. Błędy statyczne i dynamiczne
O niedokładności działania URA świadczą błędy (uchyby) statyczne i dynamiczne. Uchyb /() ma dwa składniki: uchyb nadążania ew(t) i uchyb tłumienia zakłóceń ez(t) [8.1]. W liniowym URA składniki te sumują się. W stanie statycznym, tj. w stanie ustalonym przy wymuszeniu skokowym o amplitudzie A, statyczny błąd. reputacji
co) = hm lsHe(sj]
s=> 0
lim
= e(t--
s — G.(s)"| = lim UG.(s)] (8.27)
J 5=>0
przy czym: He — transformata Laplace’a charakterystyki skokowej; Ge = 1/[1 + GJ dla sygnału w(t), a Ge = GJ\ + G„] dla zakłócenia; Ga — transmitancja układu otwartego: G — transmitancja ” zakłóceniowa. Stad uchyb statyczny es = es„+esz = [A„+
Jeżeli es = 0, to URA jest nazywany astatycznym. Układ jest astatyczny, jeżeli w R(s) lub G„(s) występuje człon całkujący. W statycznym URA uchyby statyczne e„ = AJ\_ 1 + KrKoh], esz = ASKJ\_ 1 +KrKob], przy czym: Kr, Kob i K2 — wzmocnienia regulatora, obiektu i toru zakłócenia.
Uchyby dynamiczne e(t) są związane ze stanami dynamicznymi URA. Dokładność dynamiczną URA określa się za pomocą uchybów w stanach ustalonych przy wymuszeniach standardowych typu skok prędkości skok przyspieszenia a0t2l(t) lub fala
harmoniczna aAcos(o>£) l(t). Uchyby dynamiczne związane z tymi sygnałami (prędkoś-ciowy, przyspieszony i częstotliwościowy) wynoszą
«.*=». lim [d [Gc(s)]/ds],
$=>0
ehW = Ufc|Gc0'm)l
= a„ lim [d2[Gs(s)]/ds2]/2
(8.28)
Uchyb ev jest równy zeru w układzie astatycznym drugiego rzędu, ae( — w układzie astatycznym trzeciego rzędu, tj. w URA zawierającym odpowiednio co najmniej 2 i 3 człony całkujące.
8-4.3. Kryteria oceny jakości układów regulacji automatycznej
Jakość URA ocenia się na podstawie całego przebiegu przejściowego e(t)Vte[0,co], " cpju wyeliminowania subiektywizmu oceny wprowadza się miary jakości przebiegu Przejściowego e(t) — tzw. wskaźniki jakości regulacji. Najpopularniejszymi wskaźnikami jakości regulacji są [8.1; 8.2; 8.6; 8.9; 8.15; 8.30; 8.31]:
> uchyby: statyczny, prędkościowy, przyspieszony częstotliwościowy i maksymalny em ~ max[e(t)] (rys. 8.21);
k) czas regulacji ^rozumiany jako czas po jakim |e(t)| < A V(r > i, gdzie A — dopuszczalne odchylenie przyjmowane jako (5% lub 1%) em albo (1% lub 5%) amplitudy
, wymuszenia;
, Pr^eregulowanie * = 100AJA0 i oscvlacyjność d = 100^42Mi, w procentach;
' wskaźniki całkowe: IAE = /[|e(t)|], IŚE = J[e2(t)],ITAE = I[t|e|] i ITSE = I[te2(t)l
CC
gdzie operator /[...] = j [,..]d£.
ścj j^ujczęściej dąży się do zaprojektowania regulatora tak, by wybrany wskaźnik jako-’ P- JAE lub tr, był minimalny przy dostatecznie d użym zapasie stabilności [8.15; 8.30].
Wyszukiwarka
Podobne podstrony:
1tom212 8. AUTOMATYKA I ROBOTYKA-426 Logarytmiczna charakterystyka fazy takiego układu otwartego jes
1tom213 8. AUTOMATYKA 1 ROBOTYKA 428 Ylys. &.15. Mtałiza działania nieliniowego V1R drugiego rz
1tom215 8. AUTOMATYKA I ROBOTYKA -432 Ze względu na dużą liczbę obliczeń wykonywanych przy wyznaczan
1tom217 8. AUTOMATYKA I ROBOTYKA^436 ochronnych, kontrola wymiarów, montaż, malowanie, a nawet skład
1tom219 8. AUTOMATYKA 1 ROBOTYKA440 Około 80% chwytaków ma napęd pneumatyczny. Wynika to z prostoty
Politechnika WrocławskaPodsumowanie podejść do jakości danych Nie można zastosować jednego kryterium
Po obliczeniu współczynników i zestawieniu tablicy Routha, można zastosować drugi warunek kryte
1tom211 -424 8. AUTOMATYKA I ROBOTYKA Rys. 8.21. Wskaźniki jakości regulacji; prze regulowanie * = A
1tom214 430 8. AUTOMATYKA I ROBOTYKA Jeżeli regulator diagonalny nie zapewnia dostatecznej jakości r
1tom216 -434 8. AUTOMATYKA I ROBOTYKA Symulowany układ, np. regulator PI z nasyceniem (rys 8.28a), n
1tom218 -438 8. automatyka i robotyka Rys. 8.32. Serwomechanizmy robotów a) serwom
Image515 leżność napięć progowych od wzmocnienia tranzystora TL W układzie można zastosować diodę kr
Semestr 3 kierunek AUTOMATYKA i ROBOTYKA g/tydz sem. 3 w ć I £ ects egz Język
Semestr 5 - strumień: Systemy automatyki kierunek AUTOMATYKA i ROBOTYKA strumień SYSTEMY
Semestr 6 - strumień: Systemy decyzyjne kierunek AUTOMATYKA i ROBOTYKA strumień SYSTEMY
więcej podobnych podstron