1tom203
-408
8. AUTOMATYKA I ROBOTYKA
8.2. Elementy układów regulacji
W URA (rys. 8.5) — oprócz urządzeń pomiarowych EP, urządzeń regulacyjny h i zadających (regulatory i stacyjki), urządzeń wykonawczych (EWi ZR) -- stosuje"'-, urządzenia pomocnicze, takie jak mierniki oraz sygnalizatory i rejestratory wielko^ obrazujące przebieg procesu. W URA operuje sTę standardowymi sygnałami nn prądowym 0-^5 mA lub 4-=-20 mA, napięciowym +10 V lub 0--5 V prądu stałego ciśnieniowym 0,2 I atn*(20- lOOk Pa). Warunkuje to unifikację urządzeń. Można dzięki temu stosować uniwersalne regulatory do automatyzacji różnych procesów. Ułatwia to produkowanie przez różne firmy urządzeń automatyzacji pasujących do siebie.
8.2.1. Urządzenia pomiarowe
Przetworniki pomiarowe przetwarzają wielkości otrzymywane z czujników, natomiast przetworniki standaryzujące zmieniają zakresy tej samej wielkości fizycznej, dopasowując ją do wejścia sąsiadującego aparatu w URA. O jakości czujników i przetworników decydują ich właściwości statyczne i dynamiczne. Właściwości statyczne są opisywane za pomocą charakterystyk statycznych, zakresu pomiarowego, strefy nicczulości, histerezy i klasy niedokładności. W tablicy 8.1 przedstawiono przegląd czujników temperatury, ciśnienia i przepływu.
Właściwości dynamiczne urządzeń pomiarowych opisuje się za pomocą charakterystyk częstotliwościowych, skokowych albo parametrów odpowiedzi skokowej, takich jak: czas ustalania się odpowiedzi skokowej, czas połówkowy (po którym wielkość wyjściowa osiąga po raz pierwszy połowę wartości ustalonej) lub przeregulowanic [8.31].
Tablica 8.1. Czujniki temperatury, ciśnienia oraz natężenia przepływu
|
Rodzaj czujnika |
Zakres pomiarowy |
Błąd pomiaru |
Wielkość wyjściowa |
|
Czujniki temperatury | |||
|
Termometry: — dylatacyjne |
-200-!- + 500°C |
2-1-3% |
wydłużenie |
|
- manometryczne gazowe |
0-5-300oC |
> 1,5% |
ciśnienie azotu lub helu |
|
manometryczne parowe |
0-r2007C |
> 1,5% |
ciśnienie metylu lub benzenu |
|
manometryczne cieczowe |
—60-r 550°C |
1-5-2% |
ciśnienie rtęci lub ksylolu |
|
oporowe niklowe |
—60 -+150°C |
0,5-1% |
rezystancja (10 ;-1000 fi) |
|
oporowe platynowe |
-200-r800=C |
0,5-1% |
rezystancja (20 : 1000 Q) |
|
termoelektryczne (term opary) |
-200-i-20005C |
1,5% |
napięcie (—10 : 4*70 mV) |
|
Pirometry: — promieniowania całkowitego |
400 —2500"C |
2% |
sem termoelemcntów |
|
- monochromatyczne |
450 4- 3500<!C |
t% |
natężenie prądu __ |
|
dwubarwowe |
800 +- 2800 'C |
i% |
stosunek dwóch składowych promil0” wania |
* atn — oznacza atmosferę nadciśnienia (ponad ciśnienie atmosferyczne). W automatyce stosuje się urządzenia operujące ciśnieniem absolutnym.
tak#
Tablica 81 (cd-)
|
Rodzaj czujnika |
Zakres pomiarowy |
Błąd pomiaru |
Wielkość wyjściowa |
|
C |
zujniki ciśnienia | ||
|
■Jtenonietry: z elementami sprężystymi |
0,06-:-1000 MPA |
> 1% |
przesunięcie rurki Bourdona, membrany, mieszka sprężystego |
|
dzwonowe |
1-2 kPa |
>0.1% |
przesunięcie dzwonu pływającego w cieczy, np. rtęci |
|
— ten$ometryc7ne |
0+300 MG |
1-1,5% |
zmiany rezystancji (0 — 2%) wywołane zmianami naprężeń |
|
Czujniki natężenia przepływu | |||
|
Zwyżkowe |
średnice nominalne: 10-1000 mm; ciśnienie: 0,6-10 MPa |
1,5-:- 2,5% |
spadek ciśnienia na zwężce, kryzie lub dyszy Venturiego |
|
Rotamctry |
0+100 m3/h |
1,5+ 2,5% |
przesunięcie pływaka przez ciśnienie hydrodynamiczne (0 — 30 cm) |
Są dwa podstawowe typy przetworników pomiarowych: pracujące w układzie otwartym; pracujące w układzie zamkniętym (kompensacyjne) [8.14; 8.31], Przykładem przetwornika pracującego w układzie otwartym może być niezrównoważony mostek prądu stałego, przetwarzający zmiany rezystancji na zmiany napięcia.
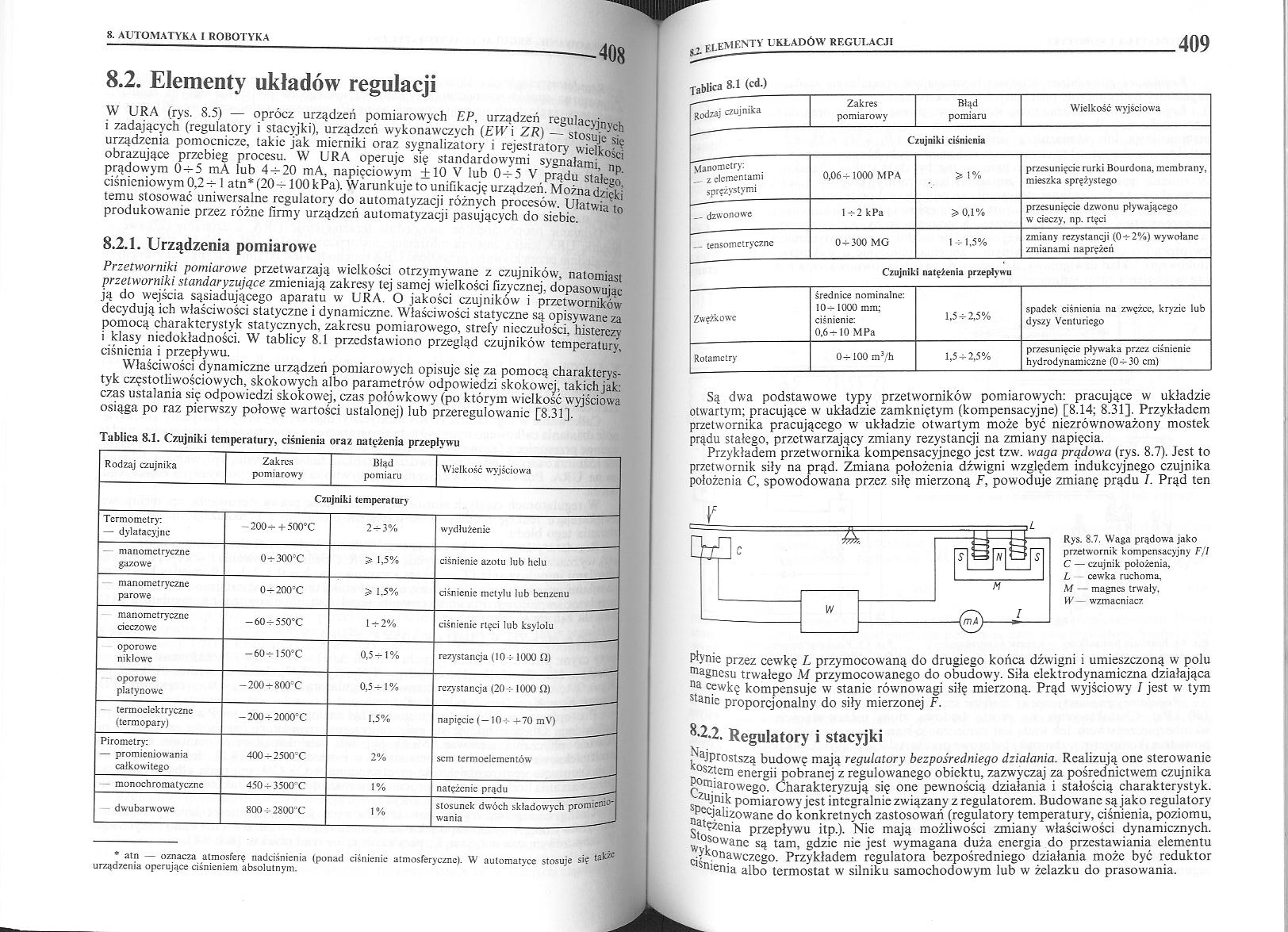
Przykładem przetwornika kompensacyjnego jest tzw. waga prądowa (rys. 8.7). Jest to przetwornik siły na prąd. Zmiana położenia dźwigni względem indukcyjnego czujnika położenia C, spowodowana przez siłę mierzoną F, powoduje zmianę prądu I. Prąd ten
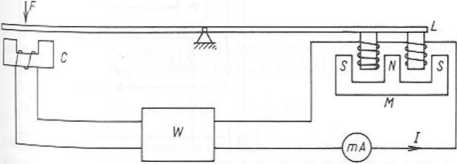
Rys. 8.7. Waga prądowa jako przetwornik kompensacyjny FJl C — czujnik położenia,
L cewka ruchoma,
M — magnes trwały,
W — wzmacniacz
Płynie przez cewkę L przymocowaną do drugiego końca dźwigni i umieszczoną w polu m£tgncsu trwałego M przymocowanego do obudowy. Siła elektrodynamiczna działająca na cewkę kompensuje w stanie równowagi siłę mierzoną. Prąd wyjściowy I jest w tym sianie proporcjonalny do siły mierzonej F.
8-2.2. Regulatory i stacyjki
^ ajprostszą budowę mają regulatory bezpośredniego działania. Realizują one sterowanie °sztem energii pobranej z regulowanego obiektu, zazwyczaj za pośrednictwem czujnika Pomiarowego. Charakteryzują się one pewnością działania i stałością charakterystyk.
7-uJnik pomiarowy jest integralnie związany z regulatorem. Budowane sąjako regulatory jPPpJ.nlizow-ane do konkretnych zastosowań (regulatory temperatury, ciśnienia, poziomu, wżenią przepływu itp.). Nic mają możliwości zmiany właściwości dynamicznych. Wvtf°Wanc tam> gdzie nie jest wymagana duża energia do przestawiania elementu >'-°nawczego. Przykładem regulatora bezpośredniego działania może być reduktor lllenia albo termostat w- silniku samochodowym lub w żelazku do prasowania.
Wyszukiwarka
Podobne podstrony:
Podstawowe elementy w automatyce • Podstawowe elementy układów automatyki można podzielić ze względu
1tom202 8. AUTOMATYKA I ROBOTYKA406 regulacyjny ZR i zadajnik wartości zadanej ZWZ. Element wykonawc
1tom204 8. AUTOMATYKA I ROBOTYKA410 Regulatory pośredniego działania (wymagające specjalnego zasilan
1tom205 8. AUTOMATYKA 1 ROBOTYKA412 Współczesne regulatory impulsowe są mikroprocesorowe (rys. 8.11)
Badanie elementów układów automatycznego sterowania 6. Wnioski. 7.
Badanie elementów układów automatycznego sterowania 1. Budowa i zasada działania elementów układów
Badanie elementów układów automatycznego sterowania Styki główne są zazwyczaj otwarte, a styki
Badanie elementów układów automatycznego sterowania Pomimo zwolnienia nacisku na przycisk włączający
Badanie elementów układów automatycznego sterowania Na rys. 4 pokazano charakterystykę sterowania
Badanie elementów układów automatycznego sterowania termiczne, kierunkowe (kierunek). W praktyce
Badanie elementów układów automatycznego sterowania Rys. 5. Schemat budowy przekaźnika czasowego
Badanie elementów układów automatycznego sterowania Rys. 7. Schemat układu pomiarowego do wyznaczani
Badanie elementów układów automatycznego sterowania 2. Badanie przekaźnika czasowe
skanuj0126 Urządzenia pomiarowe Urządzenie pomiarowe jest elementem układu regulacji automatycznej s
Przykłady zastosowań Elementy Automatyki do Przemysłowych Układów
więcej podobnych podstron