1tom202
8. AUTOMATYKA I ROBOTYKA
406
regulacyjny ZR i zadajnik wartości zadanej ZWZ. Element wykonawczy EWi zawór ZR zalicza się do obiektu regulacji. Element wykonawczy składa się ze wzmacniacza W, silnika S i przekładni P. Zadaniem regulatora jest wyznaczać uchyb regulacji e(r) i generować sterowanie u(t) według zależności matematycznej zwanej prawem sterowania PS.
8.1.3. Rodzaje regulatorów
Z uwagi na prawo sterowania, regulatory dzieli się na: przerywne (dwm-, trój- lub wielopotożeniowc); ciągle (liniow-e lub nieliniowe), np. P1D; impulsowe i kwanto-wo-impulsowe, np. mikroprocesorowe.
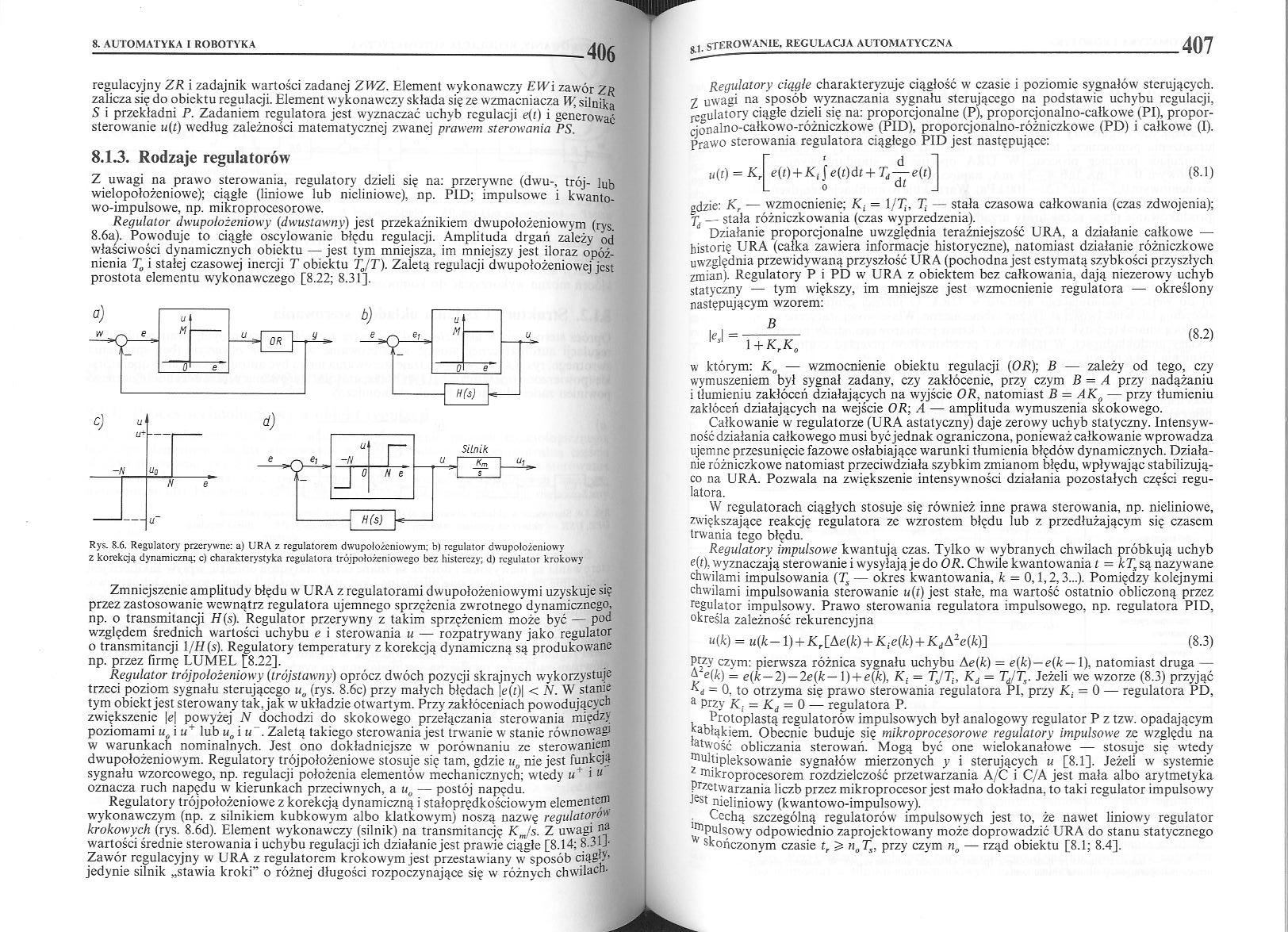
Regulator dwupolożeniowy (dwustawny) jest przekaźnikiem dwupolożeniowym (rys. 8.6a). Powoduje to ciągle oscylowanie błędu regulacji. Amplituda drgań zależy od właściwości dynamicznych obiektu — jest tym mniejsza, im mniejszy jest iloraz opóźnienia T„ i stałej czasowej inercji T obiektu TJT). Zaletą regulacji dwupołożeniowej jest prostota elementu wykonawczego [8.22; 8.31 ].
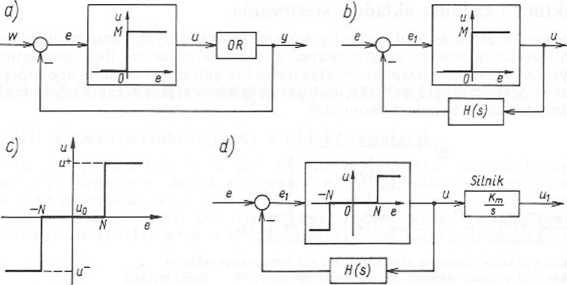
Rys. 8.6. Regulatory przerywne: a) URA z regulatorem dwupolożeniowym; b) regulator dwupolożeniowy z korekcją dynamiczną; c) charakterystyka regulatora trójpołożeniowego bez histerezy; d) regulator krokowy
Zmniejszenie amplitudy błędu w URA z regulatorami dwupołożeniowymi uzyskuje się przez zastosowanie wewnątrz regulatora ujemnego sprzężenia zwrotnego dynamicznego, np. o transmitancji H(s). Regulator przerywny z takim sprzężeniem może być — pod względem średnich wartości uchybu e i sterowania u — rozpatrywany jako regulator o transmitancji l/H (s). Regulatory temperatury z korekcją dynamiczną są produkowane np. przez firmę LUMEL [8.22].
Regulator trójpolożeniowy (trójstawny) oprócz dwóch pozycji skrajnych wykorzystuje trzeci poziom sygnału sterującego «„ (rys. 8.6c) przy małych błędach |e(t)| < N. W stanie tym obiekt jest sterowany tak, jak w układzie otwartym. Przy zakłóceniach powodujących zwiększenie |e| powyżej N dochodzi do skokowego przełączania sterowania miedz) poziomami uc i u~ lub ua i u . Zaletą takiego sterowania jest trwanie w stanic rów nowag) w warunkach nominalnych. Jest ono dokładniejsze w porównaniu ze sterowaniem dwupolożeniowym. Regulatory trójpolożeniowe stosuje się tam, gdzie u0 nie jest funkcją sygnału wzorcowego, np. regulacji położenia elementów mechanicznych; w'tedy u* i 11 oznacza ruch napędu w kierunkach przeciwnych, au, — postój napędu.
Regulatory trójpołożcniow'e z korekcją dynamiczną i stałoprędkościowym elementem wykonawczym (np. z silnikiem kubkowym albo klatkowym) noszą nazwę regulatorom krokowych (rys. 8.6d). Element wykonawczy (silnik) na transmitancję KJs. Z uwagi nj1 wartości średnie sterowania i uchybu regulacji ich działanie jest prawie ciągle [8.14; 8.3 U-Zawór regulacyjny w URA z regulatorem krokowym jest przestawiany w; sposób ciąg^’ jedynie silnik „stawia kroki” o różnej długości rozpoczynające się w różnych chwilach-
a
Regulatory ciągle charakteryzuje ciągłość w czasie i poziomic sygnałów sterujących. 2 uwagi na sposób wyznaczania sygnału sterującego na podstawie uchybu regulacji, regulatory ciągłe dzieli się na: proporcjonalne (P), proporcjonalno-całkowe (PI), propor-donalno-całkowo-różniczkowe (PID), proporcjonaino-różniczkowe (PD) i całkowe (I). Prawo sterowania regulatora ciągłego PID jest następujące:
U(t) = K-r
e(t) + Kje(£)dt+r4—e(t) Ql
gdzie: K, — wzmocnienie; Ki = 1/7], 7] — stała czasowa całkowania (czas zdwojenia); 7^ — stała różniczkowania (czas wyprzedzenia).
Działanie proporcjonalne uwzględnia teraźniejszość URA, a działanie całkowe — historię URA (całka zawiera informacje historyczne), natomiast działanie różniczkowe uwzględnia przewidywaną przyszłość URA (pochodnajest estymatą szybkości przyszłych zmian). Regulatory P i PD w URA z obiektem bez całkowania, dają niezerowy uchyb statyczny — tym większy, im mniejsze jest wzmocnienie regulatora — określony następującym wzorem:
B
1 + KrK,
w którym: K0 — wzmocnienie obiektu regulacji (OR); B — zależy od tego, czy wymuszeniem był sygnał zadany, czy zakłócenie, przy czym B = A przy nadążaniu
1 tłumieniu zakłóceń działających na wyjście OR, natomiast B = AK — przy tłumieniu zakłóceń działających na wejście OR; A — amplituda wymuszenia skokowego.
Całkowanie w regulatorze (URA astatyczny) daje zerowy uchyb statyczny. Intensywność działania całkowego musi być jednak ograniczona, ponieważ całkowanie wprowadza ujemne przesunięcie fazowe osłabiające warunki tłumienia błędów dynamicznych. Działanie różniczkowe natomiast przeciwdziała szybkim zmianom błędu, w'pływając stabilizująco na URA. Pozwala na zwiększenie intensywności działania pozostałych części regulatora.
W regulatorach ciągłych stosuje się również inne prawa sterowania, np. nieliniowe, zwiększające reakcję regulatora zc wzrostem błędu lub z przedłużającym się czasem trwania tego błędu.
Regulatory impulsowe kwantują czas. Tylko w wybranych chwilach próbkują uchyb e(t), wyznaczają sterowanie i wysyłają je do OR. Chwile kwantowania t = kTs są nazy wane chwilami impulsowania (7j — okres kwantowania, k = 0,1,2,3...). Pomiędzy kolejnymi chwilami impulsowania sterowanie u(t) jest stałe, ma wartość ostatnio obliczoną przez regulator impulsowy. Prawo sterowania regulatora impulsowego, np. regulatora PID, określa zależność rekurencyjna
u(k) = u(k-l) + Kr[Ae(k) + Kie(k) + KdA2e(k)'] (8.3)
Przy czym: pierwsza różnica sygnału uchybu Ae(k) = e(k)—e{k— 1), natomiast druaa — A2e(k) = e(k—2)—2e(k— l)-t-e(k), K, = TJT„ Kd = TJTS. Jeżeli we wzorze (8.3) przyjąć
= 0, to otrzyma się prawo sterowania regulatora PI, przy Kt = 0 — regulatora PD, a Przy K. = Kd = 0 — regulatora P.
Protoplastą regulatorów impulsowych był analogowy regulator P z tzw. opadającym jrabłąkiem. Obecnie buduje się mikroprocesorowe regulatory impulsowe zc względu na łatwość obliczania sterowań. Mogą być one wielokanałowe — stosuje się wtedy rrńdtipleksowanie sygnałów mierzonych y i sterujących u [8.1]. Jeżeli w systemie
2 mikroprocesorem rozdzielczość przetwarzania A/C i C/A jest mała albo arytmetyka Przetwarzania liczb przez mikroprocesor jest mało dokładna, to taki regulator impulsowy Jest nieliniowy (kwantowo-impulsowy).
: Cechą szczególną regulatorów' impulsowych jest to, że nawet liniowy regulator mpulsowy odpowiednio zaprojektowany może doprowadzić URA do stanu statycznego skończonym czasie tr > n0Ts, przy czym n0 — rząd obiektu [8.1; 8.4].
Wyszukiwarka
Podobne podstrony:
1tom204 8. AUTOMATYKA I ROBOTYKA410 Regulatory pośredniego działania (wymagające specjalnego zasilan
1tom205 8. AUTOMATYKA 1 ROBOTYKA412 Współczesne regulatory impulsowe są mikroprocesorowe (rys. 8.11)
1tom201 Automatyka i robotyka prof. dr hab. inż. Roman Górecki dr inż. Andrzej J. Marusak8.1.
1tom206 8. AUTOMATYKA I ROBOTYKA rfr) ■ W(s) (8.6)414 Do pierwszej grupy zalicza się opis czasowy i
1tom207 8. AUTOMATYKA 1 ROBOTYKA 416 Wielomiany licznika i mianownika transmitancji (8.8) mają posta
1tom208 8. AUTOMATYKA I ROBOTYKA418 amplitudowo-fazowe (a-i) 2(P)(8.10). Charakterystyka Lm( co) ma
1tom209 8. AUTOMATYKA I ROBOTYKA 420 Rys. 8.17. Identyfikacja metodą odpowiedzi skokowej: a) obiektó
Automatyka WYKŁAD1.1. Regulacja STAŁOWARTOŚCIOWA • Utrzymanie wartości
Regulator temperatury#0V Schemat poniżej przedstawia regulator temperatury zasilany bezpośrednio z s
1tom203 -408 8. AUTOMATYKA I ROBOTYKA8.2. Elementy układów regulacji W URA (rys. 8.5) — oprócz urząd
Zdjęcie1589 nał wartości zadanej jest wytwarzany przez dokładne stabilizatory ciśiw ■ ■ (zadajniki),
Automatyka WYKŁAD1.3. Regulacja PROGRAMOWA Realizuje zadaną w czasie zmianę wartości zadanej według
sterujaca skok Charakterystyka wartości sterującej przy skokowej zmianie wartości zadanej regulatora
1tom211 -424 8. AUTOMATYKA I ROBOTYKA Rys. 8.21. Wskaźniki jakości regulacji; prze regulowanie * = A
1tom214 430 8. AUTOMATYKA I ROBOTYKA Jeżeli regulator diagonalny nie zapewnia dostatecznej jakości r
więcej podobnych podstron