1tom207
8. AUTOMATYKA 1 ROBOTYKA 416
Wielomiany licznika i mianownika transmitancji (8.8) mają postać
L(ś) = adj[C(s/—/<)_1fi], M(s) = det(sl-A) (g]5)
Jeżeli układ ma kilka wejść i kilka wyjść, to jego opis w przestrzeni stanów stano wią równania (8.11). W dziedzinie transmitancji rozpatruje się transmitancję macie rzową, której elementami są transmitancję wiążące poszczególne wejścia z w-yjściamj [8.1; 8.2; 8.6; 8.11]. Opis typu (8.5) natomiast zawiera tyle równań różniczkowych ile jest wyjść.
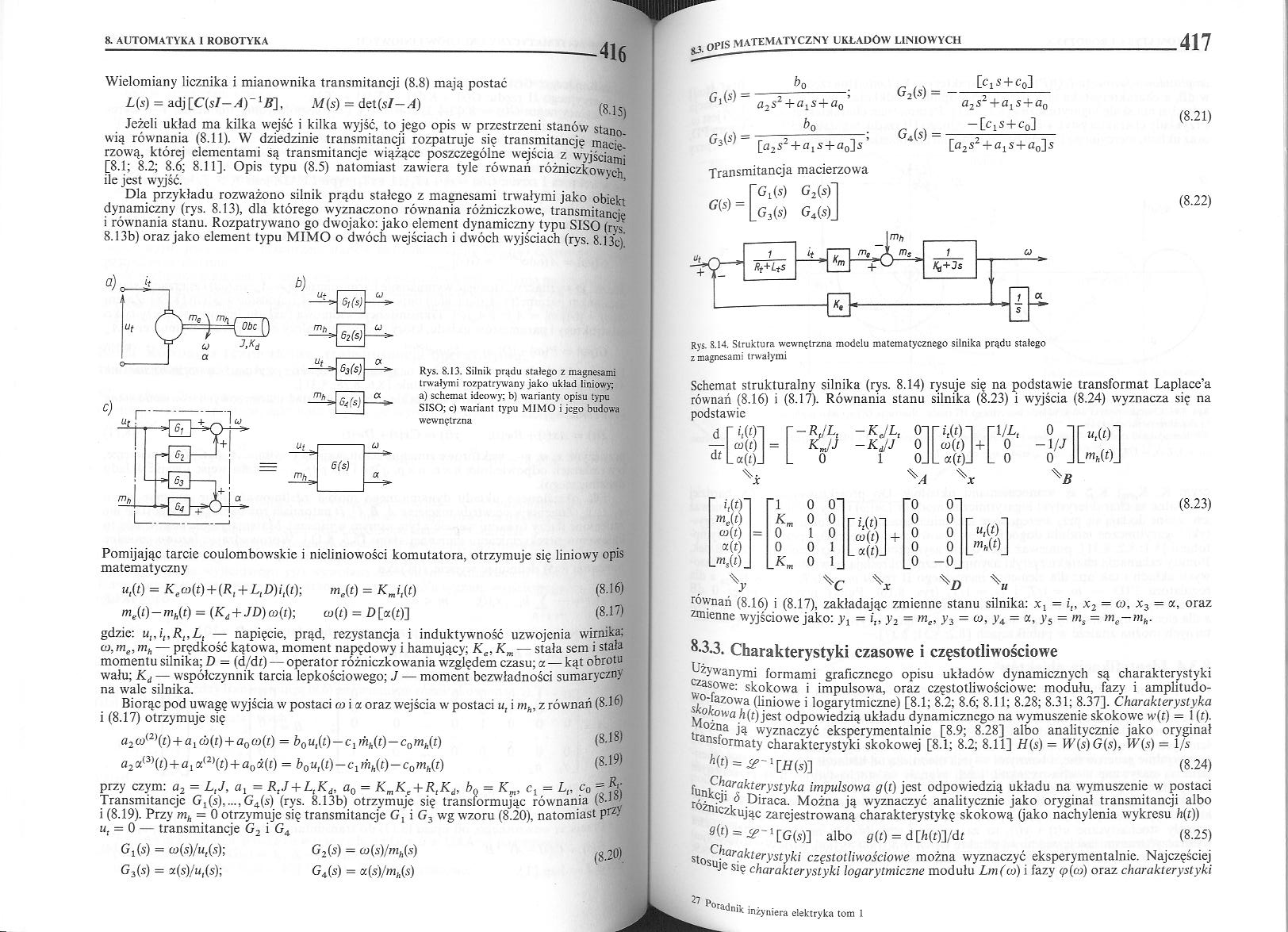
Dla przykładu rozważono silnik prądu stałego z magnesami trwałymi jako obiekt dynamiczny (rys. 8.13), dla którego wyznaczono równania różniczkowe, transmitancję i równania stanu. Rozpatrywano go dwojako: jako element dynamiczny typu SISO (rys 8.13b) oraz jako element typu MIMO o dwóch wejściach i dwóch wyjściach (rys. 8.13c)

Rys. 8.13. Silnik prądu stałego z magnesami trwałymi rozpatrywany jako układ liniowy; a) schemat ideowy; b) warianty opisu typu SISO; c) wariant typu MIMO i jego budowa wewnętrzna
Pomijając tarcie coulombowskie i nieliniowości komutatora, otrzymuje się liniowy opis matematyczny
u,(t) = Keco(t)+(R, + LlD)i,(ty, me(t) = KJ,(t) (8.16)
mh(t) = (Kd + JD) m(t); a>(t) = D [«(«)] (817)
gdzie: u,,i,,R„L, — napięcie, prąd, rezystancja i induktywność uzwojenia wirnika: cu, me, mh — prędkość kątowa, moment napędowy i hamujący; Ke,Km — stała sem i staw momentu silnika; D = (d/di) — operator różniczkowania względem czasu; a — kąt obrotu wału; Kd — współczynnik tarcia lepkościowego; J — moment bezwładności sumaryczny na walc silnika. >.
Biorąc pod uwagę wyjścia w postaci m i a oraz wejścia w postaci u, i mh, z równań (816) i (8.17) otrzymuje się
a2<om(t) + alcb(t)+a0co(t) = &o“,M-Ci">»(0-co'w*W (8]S)
a2ai3\t)+a, a<2,(£)+a0d(t) = b0u,(l)~ c^t)-c0mh(t)
przy czym: a2 = L,J, a, = R,J+L,Kd, a0 = KmKe + R,Kd, b(l = Km, ct = Lr c0 =
Transmitancję Gj(s).....G4(s) (rys. 8.l3b) otrzymuje się transformując równania
i (8.19). Przy mh — 0 otrzymuje się transmitancję G, i G, wg wzoru (8.20), natomiast pw u, = 0 — transmitancję C2 i G4
Gx(s) = m(s)/u,(s);
G3(s) = a(s)/u,(s);
G2(s) = a>(s)/mh(s) G4(s) = cc(s)/mh(s)
(8.20)
Transmitancja macierzowa
(8.22)
a2s2+a1s+a0’
___.
[a2s2 + a,s-f-a0],s ’
G2(s) =
[Cti + Cp]
a2s2+«iS+ao
-[ClS + C0]
[«2s24-«iS + a0]s
(8.21)
GJs)
GM
<?(*) =
G2(s)
GM.
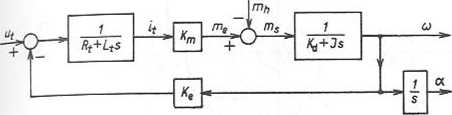
Rys. 8.14. Struktura wewnętrzna modelu matematycznego silnika prądu stałego z magnesami trwałymi
Schemat strukturalny silnika (rys. 8.14) rysuje się na podstawie transformat Laplace’a równań (8.16) i (8.17). Równania stanu silnika (8.23) i wyjścia (8.24) wyznacza się na podstawie
|
d |
r i, (oi |
-4/4 |
-KJL, |
on |
0(0 | |||
|
“(0 |
= |
KJJ |
-KJJ |
0 |
co(t) | |||
|
dć |
La(oJ |
L o |
1 |
0_ |
L a(r) | |||
|
\ | ||||||||
|
',(0 |
M |
0 0" |
'0 |
0" | ||||
|
"MO |
K |
* 0 0 |
0 |
0 | ||||
|
co(t) |
= |
0 |
1 0 |
co(0 |
+ |
0 |
0 | |
|
«(0 |
0 |
0 1 |
- a (0- |
0 |
0 | |||
|
jn |
(OJ |
K |
M o lj |
0 |
-OJ | |||
|
\ |
V |
% |
r | |||||
1/4
O
. O
równań (8.16) i (8.17), zakładając zmienne stanu silni zmienne wyjściowe jako: yy = i„ y2 = m„, y3 = co, y4 -
O
-\/J O .
B
«x(0
_mh(t)_
(8.23)
= co, x3 = cc, oraz
: m—mh.
8-3.3. Charakterystyki czasowe i częstotliwościowa
Używanymi formami graficznego opisu układów- dynamicznych są charakterystyki ?asowe: skokowa i impulsowa, oraz częstotliwościowe: modułu, fazy i amplitudo-^o-Fazowa (liniowe i logarytmiczne) [8.1; 8.2; 8.6; 8.11; 8.28; 8.31; 8.37]. Charakterystyka •. okowa h(t) jest odpowiedzią układu dynamicznego na wymuszenie skokowe w(t) = 1 (r). i 02lJa J4 wyznaczyć eksperymentalnie [8.9; 8.28] albo analitycznie jako oryginał ns‘°rmaty charakterystyki skokowej [8.1: 8.2; 8.11] H(s) = PP(s)G(s), MK(.s) = 1/s
ńW = ir->[H(s)] (8.24)
funk ~?kterystyka impulsowa g(i) jest odpowiedzią układu na wymuszenie w- postaci różn ^P'raca- Można ją wyznaczyć analitycznie jako oryginał transmitancji albo •czkując zarejestrowaną charakterystykę skokową (jako nachylenia wykresu /i(r))
9(0 = se~1 [G(s)] albo g(t) = d [h(t)]/dt
(8.25)
^osu^ar?kterystyki częstotliwościowe można wyznaczyć eksperymentalnie. Najczęściej Je się charakterystyki logarytmiczne modułu Lm(to) i fazy <p(<o) oraz charakterystyki
radnilc inżyniera elektryka tom 1
Wyszukiwarka
Podobne podstrony:
1tom201 Automatyka i robotyka prof. dr hab. inż. Roman Górecki dr inż. Andrzej J. Marusak8.1.
1tom202 8. AUTOMATYKA I ROBOTYKA406 regulacyjny ZR i zadajnik wartości zadanej ZWZ. Element wykonawc
1tom204 8. AUTOMATYKA I ROBOTYKA410 Regulatory pośredniego działania (wymagające specjalnego zasilan
1tom205 8. AUTOMATYKA 1 ROBOTYKA412 Współczesne regulatory impulsowe są mikroprocesorowe (rys. 8.11)
1tom206 8. AUTOMATYKA I ROBOTYKA rfr) ■ W(s) (8.6)414 Do pierwszej grupy zalicza się opis czasowy i
1tom208 8. AUTOMATYKA I ROBOTYKA418 amplitudowo-fazowe (a-i) 2(P)(8.10). Charakterystyka Lm( co) ma
1tom209 8. AUTOMATYKA I ROBOTYKA 420 Rys. 8.17. Identyfikacja metodą odpowiedzi skokowej: a) obiektó
Image1909 • lim X-»« lim x->« 2x + 4 x-2 2x + 4 ■ x-2 licznik i mianownik są wielomianami tegos
Image1910 • lim x-»« lim x-»« x2-4 2x + 3 licznik i mianownik są wielomianami stopień licznika >
Image1913 • lim x-»« x + 3 x2 - 9 licznik i mianownik są wielomianami stopieńlicznika < stopień m
Pomiary Automatyka Robotyka 9/2008Projekt manipulatora dla robota mobilnego Elektron Krzysztof Miano
1tom203 -408 8. AUTOMATYKA I ROBOTYKA8.2. Elementy układów regulacji W URA (rys. 8.5) — oprócz urząd
Semestr 3 kierunek AUTOMATYKA i ROBOTYKA g/tydz sem. 3 w ć I £ ects egz Język
Semestr 5 - strumień: Systemy automatyki kierunek AUTOMATYKA i ROBOTYKA strumień SYSTEMY
Semestr 6 - strumień: Systemy decyzyjne kierunek AUTOMATYKA i ROBOTYKA strumień SYSTEMY
więcej podobnych podstron