2tom162
5. MASZYNY ELEKTRYCZNE

Pozycja 1.
G — maszyna synchroniczna.
P o z y c j a 2.
A—budowa otwarta (IPOO),
C — budowa okapturzona (IP23),
Y—budowa o przewietrzaniu przelotowym obcym w obiegu otwartym lub własnym w obiegu zamkniętym z chłodnicami wodnymi (IP44).
Pozycja 3. d, e—oznacza serię.
Pozycja 4.
10.. . 20 — wielkość mechaniczna.
Pozycja 5.
4.. .32 — liczba biegunów.
P o z y c j a 6.
p, r, s, t — długość rdzenia stojana przy napięciu 6 kV, a, b, c —przy napięciu 380-^500 V.
Przykład oznaczenia: GAe 1520r oznacza maszynę synchroniczną, budowy otwartej, serii e, wielkość mechaniczna 15, 20-bicgunową (300 obr/min), o długości rdzenia r na napięcie 6 kV.
Tablica 5.60. Dane techniczne niektórych silników synchronicznych o napięciu 6 kV i cos<py = 0,9 poj. produkcji Zakładów DOLMEL (obecnie ABB DOLMEL-DRIYE)
|
Prędkość |
Moc |
Spraw- |
i, |
M, |
0L& |
Wzbudzenie |
Moment |
Masa | |||
|
obrotowa |
ność |
Af, |
Mk |
bezwład ności |
GAc |
GYe | |||||
|
obr/min |
kW |
% |
— |
— |
— |
— |
V |
A |
kg-m2 |
kg |
kg |
|
1600 |
95 |
1,65 |
5,5 |
1,8 |
0,9 |
36 |
400 |
120 |
— |
7385 | |
|
1500 |
3150 |
96 |
1,55 |
6.0 |
1,8 |
0,9 |
50 |
390 |
180 |
— |
10095 |
|
6300 |
96 |
1,6 |
7,5 |
2,0 |
0,8 |
61 |
420 |
460 |
— |
18660 | |
|
1250 |
95 |
1.8 |
6,0 |
0,9 |
1,3 |
62 |
230 |
170 |
6390 |
7310 | |
|
1000 |
2500 |
95.5 |
1.8 |
5,0 |
0,9 |
0,95 |
67 |
360 |
450 |
10680 |
11860 |
|
4000 |
96 |
1,6 |
5,5 |
1,0 |
1,0 |
77 |
380 |
730 |
14200 |
15500 | |
|
1000 |
95 |
1.75 |
5,2 |
0.9 |
1,0 |
65 |
220 |
210 |
6180 |
7150 | |
|
750 |
2500 |
96 |
1,75 |
5,5 |
0,8 |
1,0 |
74 |
310 |
800 |
11360 |
12940 |
|
5000 |
96,5 |
1,8 |
6,5 |
u |
1,0 |
100 |
370 |
1900 |
18800 |
21260 | |
|
630 |
94 |
1,85 |
5,2 |
0,8 |
1,1 |
71 |
190 |
210 |
5580 |
6500 | |
|
600 |
1600 |
95,5 |
1,75 |
5,5 |
0,8 |
1.0 |
86 |
220 |
740 |
9500 |
10840 |
|
4000 |
96,5 |
2SD |
6,0 |
0,9 |
1,1 |
100 |
310 |
2250 |
17950 |
20340 | |
|
500 |
93 |
1,9 |
5,5 |
0,65 |
u |
72 |
170 |
210 |
5650 |
6550 | |
|
500 |
1600 |
96 |
1,8 |
5,5 |
0,9 |
1,0 |
96 |
190 |
900 |
11100 |
12640 |
|
3150 |
96,5 |
2,0 |
6,0 |
0,9 |
u |
114 |
300 |
2200 |
17630 |
20000 | |
|
250 |
92 |
1,8 |
5,0 |
0,8 |
1,0 |
60 |
105 |
150 |
4100 |
5000 | |
|
375 |
1000 |
95 |
1,8 |
5,0 |
0,9 |
0,9 |
70 |
210 |
1030 |
8300 |
9800 |
|
3150 |
96,5 |
1,7 |
6,0 |
1,1 |
1,1 |
100 |
300 |
3700 |
16500 |
18700 | |
|
315 |
92,5 |
1,7 |
4,5 |
0,6 |
0,9 |
55 |
135 |
340 |
5300 |
6800 | |
|
300 |
1250 |
95 |
1.8 |
5,0 |
0,9 |
0,9 |
75 |
260 |
2100 |
10900 |
13100 |
|
4000 |
96,5 |
1,7 |
5,1 |
0,9 |
1,0 |
105 |
320 |
8000 |
22700 |
25100 | |
|
500 |
93 |
1,7 |
4,5 |
0,6 |
1,0 |
80 |
150 |
730 |
6700 |
8000 | |
|
250 |
1600 |
95,5 |
1.8 |
5,5 |
0,9 |
1,0 |
110 |
210 |
3300 |
13100 |
16200 |
|
3150 |
96 |
1,8 |
5,0 |
0,8 |
l.o |
100 |
300 |
7500 |
21900 |
24250 | |
-3 MASZYNY synchroniczne
327
5 3 10.2. Rozruch silników synchronicznych
Silniki synchroniczne są wyposażone w uzwojenie rozruchowe klatkowe, umożliwiające rozruch asynchroniczny przez włączenie silnika do sieci zasilającej. W silnikach mniejszej mocy zamiast uzwojenia rozruchowego są stosowane masywne nabiegunniki.
Bezpośrednie włączenie silnika do sieci może być stosowane wówczas, gdy sieć ma dostateczną moc zasilania, by nic wywołać szkodliwych spadków napięć. Rozruch odbvwa się jak w silniku indukcyjnym klatkowym. Przy poślizgu równym lub mniejszym od 5% włącza się układ wzbudzający, co powoduje wprowadzenie wirnika w bieg synchroniczny.
Moment rozwijany przez silnik synchroniczny podczas rozruchu asynchronicznego przy prędkości obrotowej równej 95% prędkości znamionowej nazywa się momentem wpadowym Mpi (moment podsynchroniczny). Określa on maksymalny moment obciążenia, przy którym silnik może być przez wzbudzenie wprowadzony w bieg synchroniczny (tabl. 5.60).
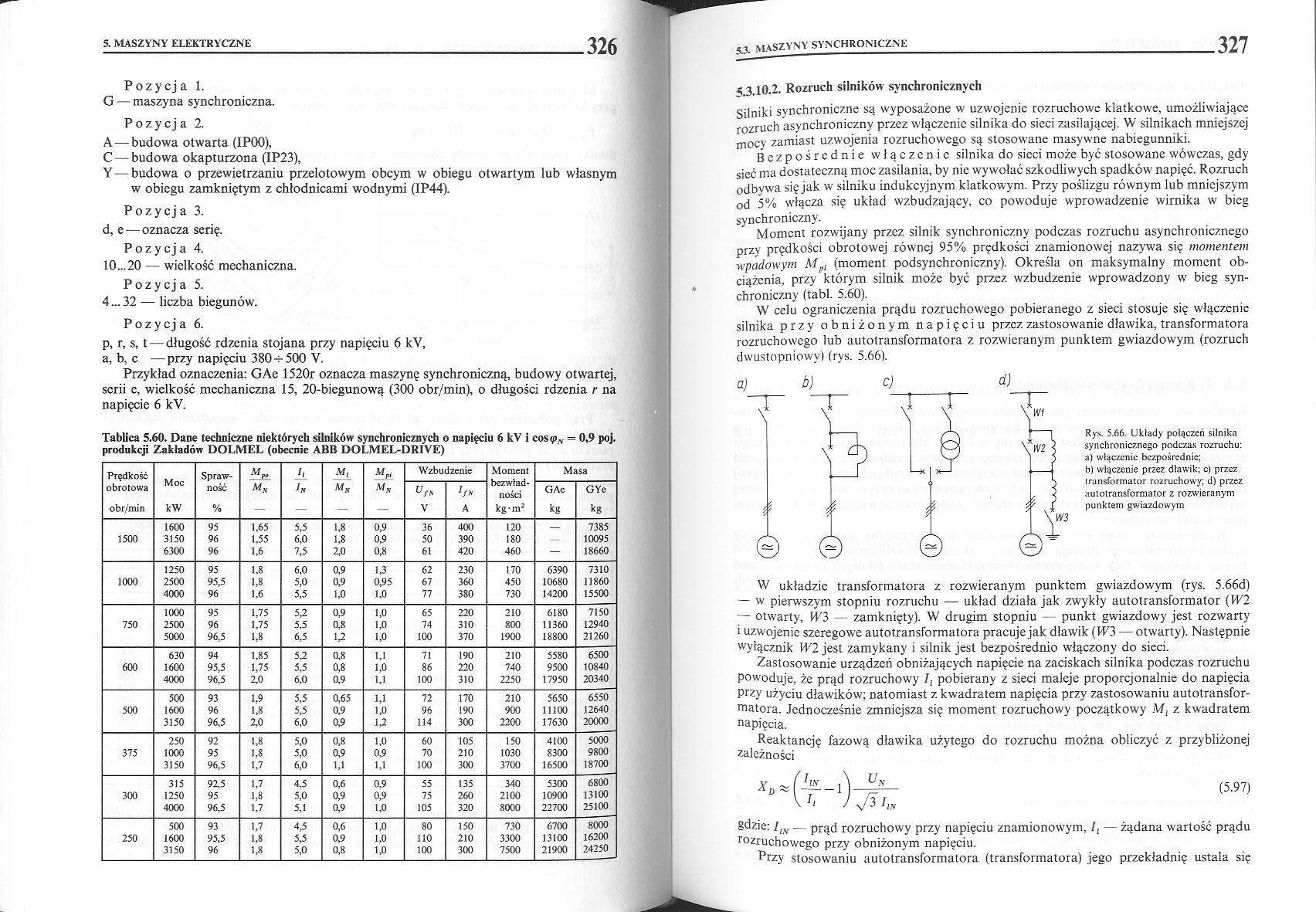
W celu ograniczenia prądu rozruchowego pobieranego z sieci stosuje się włączenie silnika przy obniżonym napięciu przez zastosowanie dławika, transformatora rozruchowego lub autotransformatora z rozwieranym punktem gwiazdowym (rozruch dwustopniowy) (rys. 5.66).
a)
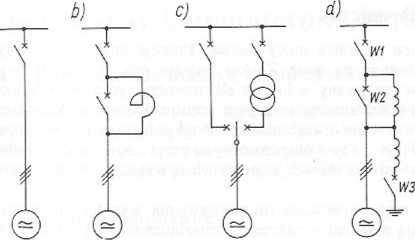
Rys. 5.66. Układy połączeń silnika synchronicznego podczas rozruchu: a) włączenie bezpośrednie;
b) włączenie przez dławik; c) przez transformator rozruchowy; d) przez autotransformator z rozwieranym punktem gwiazdowym
W układzie transformatora z rozwieranym punktem gwiazdowym (rys. 5.66d)
— w' pierwszym stopniu rozruchu — układ działa jak zwykły autotransformator {W2
— otwarty, W3 zamknięty). W drugim stopniu punkt gwiazdowy jest rozwarty i uzwojenie szeregowe autotransformatora pracuje jak dławik [W3 — otwarty). Następnie wyłącznik W2 jest zamykany i silnik jest bezpośrednio włączony do sieci.
Zastosowanie urządzeń obniżających napięcie na zaciskach silnika podczas rozruchu powoduje, że prąd rozruchowy 7, pobierany z sieci maleje proporcjonalnie do napięcia przy użyciu dławików; natomiast z kwadratem napięcia przy zastosowaniu autotransformatora. Jednocześnie zmniejsza się moment rozruchowy początkowy M, z kwadratem napięcia.
Reaktancję fazową dławika użytego do rozruchu można obliczyć z przybliżonej zależności
(5.97)
gdzie: IlN — prąd rozruchowy przy napięciu znamionowym, 7, — żądana wartość prądu rozruchowego przy obniżonym napięciu.
Przy stosowaniu autotransformatora (transformatora) jego przekładnię ustala się
Wyszukiwarka
Podobne podstrony:
2tom160 5. MASZYNY ELEKTRYCZNE 322 Przemysł krajowy produkuje następujące typy prądnic synchroniczny
2tom161 5. MASZYNY ELEKTRYCZNE 324 W awaryjnych warunkach eksploatacji dla utrzymania maszyny w sync
B (35) Wersja B I ak. 2008/09 Kolokwium II z Maszyn elektrycznych Zadanie z maszyn synchronicznych T
2tom169 5. MASZYNY ELEKTRYCZNE 340 5. MASZYNY ELEKTRYCZNE 340 Charakterystykę tę można wyrazić anali
2tom155 5. MASZYNY ELEKTRYCZNE 3125.3.6. Układy wzbudzenia maszyn synchronicznych Maszyny synchronic
2tom163 5. MASZYNY ELEKTRYCZNE uwzględniając początkowy moment rozruchowy MIATr,jaki powinien być ro
2tom164 5. MASZYNY ELEKTRYCZNE połączone elektrycznie; przekazywanie energii odbywa się wyłącznie na
2tom165 5. MASZYNY ELEKTRYCZNE 332 na parę biegunów. Szczotki są połączone z suwakiem transformatora
2tom166 5. MASZYNY ELEKTRYCZNE 334 powstaje moment obrotowy wyrażony wzorem M = C<t>1 <t>
2tom167 5. MASZYNY ELEKTRYCZNE 336 Obcowzbudna wzbudnica prądu przemiennego (przetwornica
2tom168 5. MASZYNY ELEKTRYCZNE 3385.5.2. Zastosowanie maszyn prądu stałego Maszyny
2.BADANIA2.1. Oględziny zewnętrzne Należy dokonać oględzin badanej maszyny synchronicznej oraz
Rys.2.2 Wyniki pomiarów stanu przejściowego procesu synchronizacji maszyny synchronicznej z siecią
cyjne. Bilans mocy i strat, sprawność. Maszyny synchroniczne - budowa i zasada działania. Współpraca
lndukcyjności wzajemne uzwojeń stojana maszyny synchronicznej * Najmniejsze skojarzenie uzwojeń BC b
Indukcyjności wzajemne uzwojeń stojana maszyny synchronicznej * Analogicznie,
I Uzwojenie wzbudzenia maszyny synchronicznej -= J7v5r 1 8V
Indukcyjności uzwojeń w układzie uvO Macierz indukcyjności maszyny synchronicznej w układzie
więcej podobnych podstron