2tom166
5. MASZYNY ELEKTRYCZNE 334
powstaje moment obrotowy wyrażony wzorem
M = C<t>1 <t>2 sina (5.100)
gdzie: <PX i <P2 — strumienie stojana i wirnika.
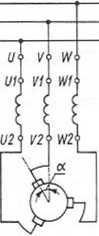
Położenie a = 0 odpowiada pozycji biegu jałowego, natomiast a = 180° (elektr.) — pozycji zwarcia; w obu przypadkach moment jest równy zeru (rys. 5.77). W stanie pracy (0 < a < 180°) regulując kąt a można dostosować moment obrotowy silnika przy wymaganej prędkości obrotowej do określonego obciążenia.
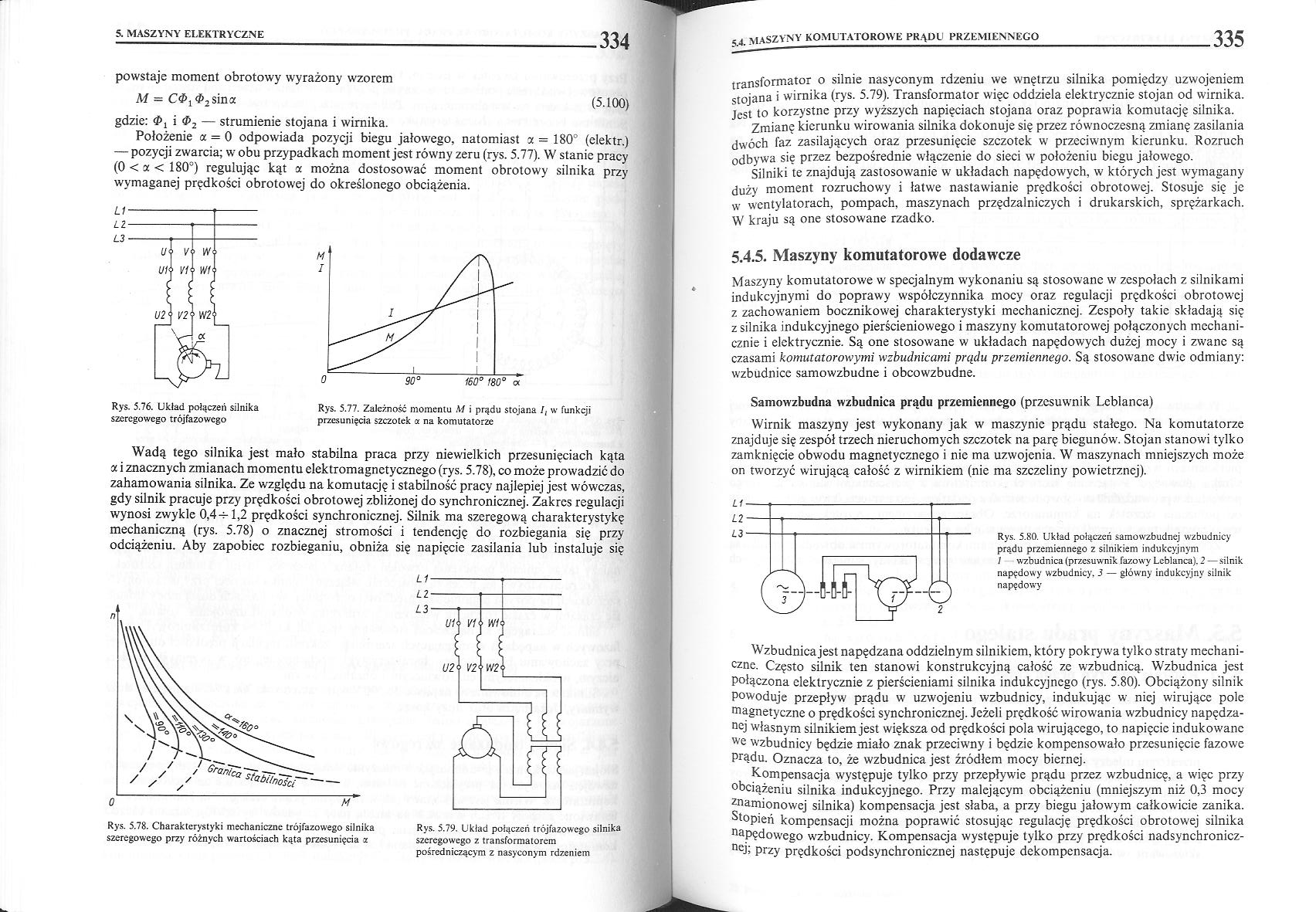
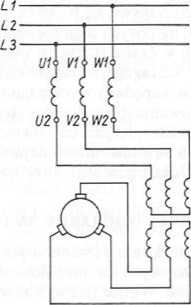
Rys. 5.76. Układ połączeń silnika szeregowego trójfazowego
Rys. 5.77. Zależność momentu M i prądu stojana I, w funkcji przesunięcia szczotek a na komutatorze
U
LI
L3
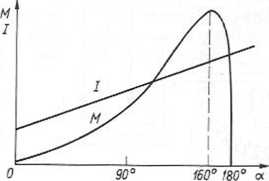
Wadą tego silnika jest mało stabilna praca przy niewielkich przesunięciach kąta a i znacznych zmianach momentu elektromagnetycznego (rys. 5.78), co może prowadzić do zahamowania silnika. Ze względu na komutację i stabilność pracy najlepiej jest wówczas, gdy silnik pracuje przy prędkości obrotowej zbliżonej do synchronicznej. Zakres regulacji wynosi zwykle 0,4+1,2 prędkości synchronicznej. Silnik ma szeregową charakterystykę mechaniczną (rys. 5.78) o znacznej stromości i tendencję do rozbiegania się przy odciążeniu. Aby zapobiec rozbieganiu, obniża się napięcie zasilania lub instaluje się
Rys. 5.78. Charakterystyki mechaniczne trójfazowego silnika Rys. 5.79. Układ połączeń trójfazowego silnika
szeregowego przy różnych wartościach kąta przesunięcia a szeregowego z transformatorem
pośredniczącym z nasyconym rdzeniem
transformator o silnie nasyconym rdzeniu we wnętrzu silnika pomiędzy uzwojeniem stojana i wirnika (rys. 5.79). Transformator więc oddziela elektrycznie stojan od wirnika, jest to korzystne przy wyższych napięciach stojana oraz poprawia komutację silnika.
Zmianę kierunku wirowania silnika dokonuje się przez równoczesną zmianę zasilania dwóch faz zasilających oraz przesunięcie szczotek w przeciwnym kierunku. Rozruch odbywa się przez bezpośrednie włączenie do sieci w położeniu biegu jałowego.
Silniki te znajdują zastosowanie w układach napędowych, w których jest wymagany duży moment rozruchowy i łatwe nastawianie prędkości obrotowej. Stosuje się je w wentylatorach, pompach, maszynach przędzalniczych i drukarskich, sprężarkach. W kraju są one stosowane rzadko.
5.4.5. Maszyny komutatorowe dodawcze
Maszyny komutatorowe w specjalnym wykonaniu są stosowane w zespołach z silnikami indukcyjnymi do poprawy współczynnika mocy oraz regulacji prędkości obrotowej z zachowaniem bocznikowej charakterystyki mechanicznej. Zespoły' takie składają się z silnika indukcyjnego pierścieniowego i maszyny komutatorowej połączonych mechanicznie i elektrycznie. Są one stosowane w układach napędowych dużej mocy i zwane są czasami komutatorowymi wzbudnicami prądu przemiennego. Są stosowane dwie odmiany: wzbudnice samowzbudne i obcowzbudne.
Samowzbudna wzbudnica prądu przemiennego (przesuwnik Lcbianca)
Wirnik maszyny jest wykonany jak w maszynie prądu stałego. Na komutatorze znajduje się zespół trzech nieruchomych szczotek na parę biegunów. Stojan stanowi tylko zamknięcie obwodu magnetycznego i nic ma uzwojenia. W maszynach mniejszych może on tworzyć wirującą całość z wirnikiem (nie ma szczeliny powietrznej).
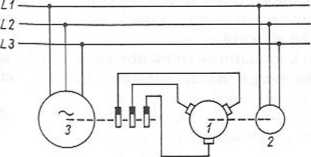
Rys. 5.80. Układ połączeń samowzbudnej wzbudnicy prądu przemiennego z silnikiem indukcyjnym / wzbudnica (przesuwnik fazowy Lcbianca). 2 — silnik napędowy wzbudnicy. 3 — główny indukcyjny silnik napędowy
Wzbudnica jest napędzana oddzielnym silnikiem, który pokrywa tylko straty mechaniczne. Często silnik ten stanowi konstrukcyjną całość ze wzbudnicą. Wzbudnica jest połączona elektrycznie z pierścieniami silnika indukcyjnego (rys. 5.80). Obciążony silnik powoduje przepływ prądu w uzwojeniu wzbudnicy, indukując w' niej wirujące pole magnetyczne o prędkości synchronicznej. Jeżeli prędkość wirowania wzbudnicy napędzanej własnym silnikiem jest większa od prędkości pola wirującego, to napięcie indukowane wc wzbudnicy będzie miało znak przeciwny i będzie kompensowało przesunięcie fazowe Prądu. Oznacza to, że wzbudnica jest źródłem mocy biernej.
Kompensacja występuje tylko przy przepływne prądu przez wzbudnicę, a więc przy obciążeniu silnika indukcyjnego. Przy malejącym obciążeniu (mniejszym niż 0,3 mocy znamionowej silnika) kompensacja jest słaba, a przy biegu jałowym całkowicie zanika. Stopień kompensacji można poprawić stosując regulację prędkości obrotowej silnika naPędowego wzbudnicy. Kompensacja występuje tylko przy prędkości nadsynchronicz-neii przy prędkości podsynchronicznej następuje dekompcnsacja.
Wyszukiwarka
Podobne podstrony:
2tom163 5. MASZYNY ELEKTRYCZNE uwzględniając początkowy moment rozruchowy MIATr,jaki powinien być ro
3 1.Wprowadzenie Mimo, że pierwsze maszyny elektryczne, które powstały w historii elektrotechniki -b
prętach klatki a więc przepływu prądu i powstawaniu momentu obrotowego jest przecinanie prętów klatk
2tom169 5. MASZYNY ELEKTRYCZNE 340 5. MASZYNY ELEKTRYCZNE 340 Charakterystykę tę można wyrazić anali
2tom160 5. MASZYNY ELEKTRYCZNE 322 Przemysł krajowy produkuje następujące typy prądnic synchroniczny
2tom161 5. MASZYNY ELEKTRYCZNE 324 W awaryjnych warunkach eksploatacji dla utrzymania maszyny w sync
2tom162 5. MASZYNY ELEKTRYCZNE326 Pozycja 1. G — maszyna synchroniczna. P o z y c j a 2. A—budowa ot
2tom164 5. MASZYNY ELEKTRYCZNE połączone elektrycznie; przekazywanie energii odbywa się wyłącznie na
2tom165 5. MASZYNY ELEKTRYCZNE 332 na parę biegunów. Szczotki są połączone z suwakiem transformatora
2tom167 5. MASZYNY ELEKTRYCZNE 336 Obcowzbudna wzbudnica prądu przemiennego (przetwornica
2tom168 5. MASZYNY ELEKTRYCZNE 3385.5.2. Zastosowanie maszyn prądu stałego Maszyny
2tom218 5. MASZYNY ELEKTRYCZNE System powstawania maszyn elektrycznych reprezentuje etap konstruowan
446 (11) PRĄDY I ELEKTROMAGNETYCZNY MOMENT OBROTOWY MASZYNY INDUKCYJNEJ ____12.1. Wprowadzenie
448 (9) 448 _ 12. Prądy i elektromagnetyczny moment obrotowy maszyny indukcyjnej wyznacznik układu r
450 (11) 45O 12 Prą(ty L elektromagnetyczny moment obrotowy maszyny indukcyjnej kie składniki tych s
456 (10) 450 12. Prądy i elektromagnetyczny moment obrotowy maszyny indukcyjny 450
458 (10) 458. 12. Prądy i elektromagnetyczny moment obrotowy maszyny indukcyjnej Prądy w uzwojeniach
460 (8) ĄgQ 12. Prądy i elektromagnetyczny moment obrotowy maszyny indukcyjnej Dokładne wartości prą
464 (8) 464 _ 12. Prądy i elektromagnetyczny moment obrotowy maszyny indukcyjnej Zależność (12.5U) j
więcej podobnych podstron