458 (10)

458. 12. Prądy i elektromagnetyczny moment obrotowy maszyny indukcyjnej
Prądy w uzwojeniach przy poślizgu krytycznym są 2-f3 razy większe niż znamionowe i w maszynie zaznacza się wpływ stopnia nasycenia obwodu magnetycznego na reaktancję uzwojeń, a więc także na współczynniki rozproszenia t oraz ir Reaktancje należy zatem obliczać z uwzględnieniem wskazówek podanych w p. 10.3.8.
W większości maszyn |sj < 0,3; częstotliwość prądu w wirniku jest więc stosunkowo mała. W obliczeniach momentu obrotowego krytycznego oraz przedążalności momentem można więc przyjąć, że prąd w przewodach wirnika jest rozłożony równomiernie — tzn. że można nie uwzględniać ani zjawiska wypierania prądu w prętach uzwojeń, ani wpływu indukcyjności rozproszeniowych na rozdział prądu wirnika między klatkę roboczą a klatkę rozruchową w maszynie o wirniku dwuklatkowym.
Przeciążalność momentem obrotowym maszyny indukcyjnej

(12.39)
i jest przy pracy silnikowej zawsze mniejsza niż przy pracy prądnicowej. W projektowaniu nie należy koizystać z rozpowszechnionej zależności
(12.40a)
ani z jej postaci udokładnionej

(12.40b)
w których: sk — poślizg krytyczny; s„ — poślizg znamionowy; e, — parametr wg (1111).
Zależności te wynikają bowiem z rozważań, w których nie uwzględnia się wpływu zmian stopnia nasycenia obwodu magnetycznego na reaktancje maszyny przy zmianie poślizgu od sN do sb.
Jeżeli wyznaczona w podany sposób przeciążalność mb jest mniejsza albo większa od wymaganej o ponad np. 30%, to obliczenia projektowe należy ponowić, zmieniając odpowiednio wymiary obwodu magnetycznego oraz uzwojeń. Ze wzorów (12.38) wynika, że moment obrotowy krytyczny M* zależy przede wszystkim od sumy reaktancji rozproszeniowych uzwojeń sto-jana i wirnika — tj. od reaktancji zwarciowej maszyny. Jeżeli więc przeciążalność jest za mała, to reaktancję zwarciową należy zmniejszyć; jeżeli zaś za duża — zwiększyć.
Zwiększenie przedążalności wiąże się ze wzrostem masy, a więc i wzrostem kosztu materiałów maszyny. Przeciążalność należy zatem zmniejszać w taki
459
12.6. Parametry rozruchowe silnika
sposób, żeby oszczędność materiałów była jak największa, a zwiększać tak — żeby wzrost kosztu był jak najmniejszy.
Małe zmiany przeciążalności osiąga się przez zmianę wymiarów żłobków — zwłaszcza wymiarów b, i h, — rys. 7.16 oraz rys. 7.18. Najbardziej skutecznym sposobem zwiększenia przeciążalności jest zmniejszenie liczby zwojów, a zmniejszenia przeciążalności — ich zwiększenie. Pociąga to jednak za sobą zmiany także wymiarów głównych maszyny — rozdz. 7.
12.6. Parametry rozruchowe silnika
Parametry rozruchowe oblicza się przy projektowaniu silników z trwale zwartymi uzwojeniami w wirniku, np. silników o wirniku klatkowym lub dwuklatkowym.
W silniku o wirniku pierścieniowym można bowiem uzyskać wymagany moment rozruchowy początkowy oraz prąd rozruchowy początkowy za pomocą elementów dodatkowo włączanych w obwód wtórny maszyny — np. rozrusznika o regulowanej rezystancji.
Przy poślizgu s = 1 prąd w wirniku ma częstotliwość fr = f, oraz wartość wielokrotnie, np. 5-krotnie, większą niż znamionowa. W obliczeniach prądów w uzwojeniach oraz elektromagnetycznego momentu obrotowego należy zatem uwzględniać duży wpływ stopnia nasycenia obwodu magnetycznego na reaktancje oraz — odpowiednio do kształtu prętów uzwojenia oraz struktury uzwojeń klatkowych — uwzględniać wpływ wypierania prądu na zwiększenie ich rezystancji i zmniejszenie reaktancji.
Prąd oraz moment obrotowy rozruchowy początkowy, jak również parametry schematu zastępczego przy poślizgu s = 1 oznaczono dodatkowym indeksem i.
12.6.1. Silnik o wirniku jednoklatkowym bez wypierania prądu
Prąd rozruchowy początkowy oblicza się na podstawie schematu zastępczego z rys. 12.5. Można zatem posłużyć się zależnościami (12.1), podstawiając w nich poślizg 5=1.
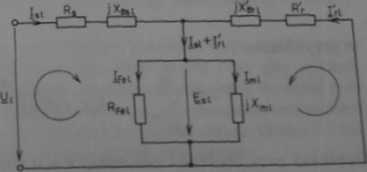
Rys. 12.5. Schemat zastępczy maszyny indukcyjnej symetrycznej przy poślizgu !■ I
Wyszukiwarka
Podobne podstrony:
476 (6) A7ft 12. PftdY i elektromagnetyczny moment obrotowy maszyny indukcyjnej A7ft 12. PftdY i ele
484 (7) 4£4 12 Pwfr i elektromagnetyczny moment obrotowy maszyny indukcyjnej Poszc
456 (10) 450 12. Prądy i elektromagnetyczny moment obrotowy maszyny indukcyjny 450
446 (11) PRĄDY I ELEKTROMAGNETYCZNY MOMENT OBROTOWY MASZYNY INDUKCYJNEJ ____12.1. Wprowadzenie
448 (9) 448 _ 12. Prądy i elektromagnetyczny moment obrotowy maszyny indukcyjnej wyznacznik układu r
460 (8) ĄgQ 12. Prądy i elektromagnetyczny moment obrotowy maszyny indukcyjnej Dokładne wartości prą
464 (8) 464 _ 12. Prądy i elektromagnetyczny moment obrotowy maszyny indukcyjnej Zależność (12.5U) j
478 (6) 478 _ 12. Prądy i elektromagnetyczny moment obrotowy maszyny indukcyjnej poślizgowi s„ przyr
482 (6) 482 _ 12. Prądy i elektromagnetyczny moment obrotowy maszyny indukcyjnej Rys. 12.9. Statyczn
486 (7) 486 _ 12. Prądy i elektromagnetyczny moment obrotowy maszyny indukcyjnej 486 _ 12. Prądy i e
DSCF1274 ĄjĄ 12, Prądy i elektromagnetyczny moment obrotowy maszyny indukcyjnej V" X (i+a,,a
450 (11) 45O 12 Prą(ty L elektromagnetyczny moment obrotowy maszyny indukcyjnej kie składniki tych s
472 (8) 472 /■?- Prądy i elektromagnetyczny moment obrotowy maszyny indukcyjnej Re
454 (8) 454 _ 12. Prądy i e/ektromagnetyczny moment obrotowy maszyny indukcyjnej 454 _ 12. Prądy i e
462 (8) 452 IZ Prądy i aMctmmagnetyczny moment obrotowy maszyny indukcyjnej 12.6.2. Silnik o wirniku
480 (7) 4gQ 12. Prądy i tkktromignetyuny moment obrotowy maszyny indukcyjnej a po uwzględnieniu zale
488 (7) 488 13 Prądy i elektromagnetyczne momenty obrotowe maszyny. U„ — napięcie znamionowe uzwojen
490 (5) 490 13. Prądy i elektromagnetyczne momenty obrotowe maszyny.ii W celu uwzględnienia wpływu s
492 (5) 492_ 13. Prądy i elektromagnetyczne momenty obrotowe maszyny mogą wystąpić podczas udarowego
więcej podobnych podstron