456 (10)
450 12. Prądy i elektromagnetyczny moment obrotowy maszyny indukcyjny
450 12. Prądy i elektromagnetyczny moment obrotowy maszyny indukcyjny
*4
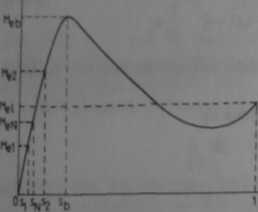
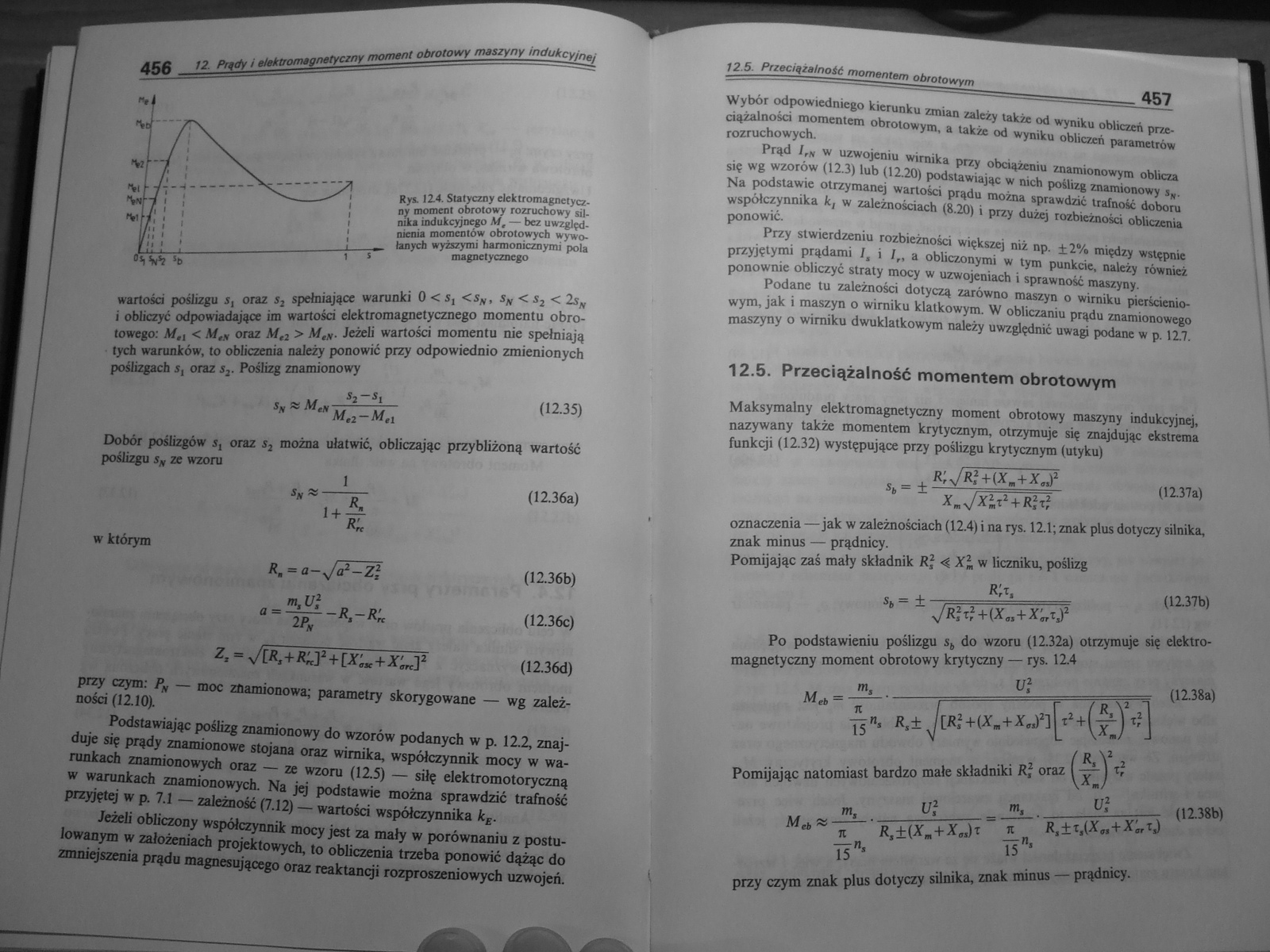
Rys. 12.4. Statyczny elektromagnetyczny moment obrotowy rozruchowy silnika indukcyjnego M,— bez uwzględnienia momentów obrotowych wywo-, lanych wyższymi harmonicznymi pola 1 magnetycznego
wartości poślizgu s, oraz s2 spełniające warunki 0 < s, <sN, sn<s2< 2s„ i obliczyć odpowiadające im wartości elektromagnetycznego momentu obrotowego: M,! < oraz Mtl > M,H. Jeżeli wartości momentu nie spełniają tych warunków, to obliczenia należy ponowić przy odpowiednio zmienionych poślizgach s, oraz s2. Poślizg znamionowy
(12-35)
Dobór poślizgów s, oraz s2 można ułatwić, obliczając przybliżoną wartość poślizgu s„ ze wzoru
|
frŁg D |j |
(12.36a) |
|
(12.36b) | |
|
(12.36c) | |
|
J[R,+K'?HX'„+X'„Y |
(12.36d) |
przy czym: PN — moc znamionowa; parametry skorygowane — wg zależności (12.10).
Podstawiając poślizg znamionowy do wzorów podanych w p. 12.2, znajduje się prądy znamionowe stojana oraz wirnika, współczynnik mocy w warunkach znamionowych oraz — ze wzoru (12J) — siłę elektromotoryczną w warunkach znamionowych. Na jej podstawie można sprawdzić trafność przyjętej w p. 7.1 — zależność (7.12) — wartości współczynnika kt.
Jeżeli obliczony współczynnik mocy jest za mały w porównaniu z postulowanym w założeniach projektowych, to obliczenia trzeba ponowić dążąc do zmniejszenia prądu magnesującego oraz reaktancji rozproszeniowych uzwojeń.
Wybór odpowiedniego kierunku zmian zależy także od wyniku obliczeń prze-ciążalności momentem obrotowym, a także od wyniku obliczeń parametrów rozruchowych.
Prąd /,„ w uzwojeniu wirnika przy obciążeniu znamionowym oblicza się wg wzorów (12.3) lub (12.20) podstawiając w nich poilizg znamionowy Na podstawie otrzymanej wartości prądu można sprawdzić trafność doboru współczynnika fc, w zależnościach (8.20) i przy dużej rozbieżności obliczenia ponowić.
Przy stwierdzeniu rozbieżności większej niż np. ±2% między wstępnie przyjętymi prądami 7f i /„ a obliczonymi w tym punkcie, należy również ponownie obliczyć straty mocy w uzwojeniach i sprawność maszyny.
Podane tu zależności dotyczą zarówno maszyn o wirniku pierścieniowym, jak i maszyn o wirniku klatkowym. W obliczaniu prądu znamionowego maszyny o wirniku dwuklatkowym należy uwzględnić uwagi podane w p. 117.
12.5. Przeciążalność momentem obrotowym
Maksymalny elektromagnetyczny moment obrotowy maszyny indukcyjnej, nazywany także momentem krytycznym, otrzymuje się znajdując ekstrema funkcji (1232) występujące przy poślizgu krytycznym (utyku)
oznaczenia — jak w zależnościach (12.4) i na rys. 121; znak plus dotyczy silnika, znak minus — prądnicy.
Pomijając zaś mały składnik R* < Xl w liczniku, poślizg
Po podstawieniu poślizgu sb do wzoru (12.32a) otrzymuje się elektromagnetyczny moment obrotowy krytyczny — rys. 124

(12.38a)

M__", _ ", . u!
eb~ n R,±(Xm+XJx ~ n R,±

(1238b)
przy czym znak plus dotyczy silnika, znak minus — prądnicy.
Wyszukiwarka
Podobne podstrony:
458 (10) 458. 12. Prądy i elektromagnetyczny moment obrotowy maszyny indukcyjnej Prądy w uzwojeniach
448 (9) 448 _ 12. Prądy i elektromagnetyczny moment obrotowy maszyny indukcyjnej wyznacznik układu r
460 (8) ĄgQ 12. Prądy i elektromagnetyczny moment obrotowy maszyny indukcyjnej Dokładne wartości prą
464 (8) 464 _ 12. Prądy i elektromagnetyczny moment obrotowy maszyny indukcyjnej Zależność (12.5U) j
478 (6) 478 _ 12. Prądy i elektromagnetyczny moment obrotowy maszyny indukcyjnej poślizgowi s„ przyr
482 (6) 482 _ 12. Prądy i elektromagnetyczny moment obrotowy maszyny indukcyjnej Rys. 12.9. Statyczn
486 (7) 486 _ 12. Prądy i elektromagnetyczny moment obrotowy maszyny indukcyjnej 486 _ 12. Prądy i e
DSCF1274 ĄjĄ 12, Prądy i elektromagnetyczny moment obrotowy maszyny indukcyjnej V" X (i+a,,a
446 (11) PRĄDY I ELEKTROMAGNETYCZNY MOMENT OBROTOWY MASZYNY INDUKCYJNEJ ____12.1. Wprowadzenie
454 (8) 454 _ 12. Prądy i e/ektromagnetyczny moment obrotowy maszyny indukcyjnej 454 _ 12. Prądy i e
472 (8) 472 /■?- Prądy i elektromagnetyczny moment obrotowy maszyny indukcyjnej Re
476 (6) A7ft 12. PftdY i elektromagnetyczny moment obrotowy maszyny indukcyjnej A7ft 12. PftdY i ele
480 (7) 4gQ 12. Prądy i tkktromignetyuny moment obrotowy maszyny indukcyjnej a po uwzględnieniu zale
484 (7) 4£4 12 Pwfr i elektromagnetyczny moment obrotowy maszyny indukcyjnej Poszc
450 (11) 45O 12 Prą(ty L elektromagnetyczny moment obrotowy maszyny indukcyjnej kie składniki tych s
462 (8) 452 IZ Prądy i aMctmmagnetyczny moment obrotowy maszyny indukcyjnej 12.6.2. Silnik o wirniku
488 (7) 488 13 Prądy i elektromagnetyczne momenty obrotowe maszyny. U„ — napięcie znamionowe uzwojen
490 (5) 490 13. Prądy i elektromagnetyczne momenty obrotowe maszyny.ii W celu uwzględnienia wpływu s
492 (5) 492_ 13. Prądy i elektromagnetyczne momenty obrotowe maszyny mogą wystąpić podczas udarowego
więcej podobnych podstron