448 (9)
448 _ 12. Prądy i elektromagnetyczny moment obrotowy maszyny indukcyjnej
wyznacznik układu równań napięciowych
R,(Xm+X^)+j(Xm+XjT (12.4a)
— współczynnik rozproszenia Heylanda całkowity0
r = (12.4b)
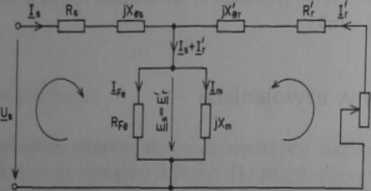
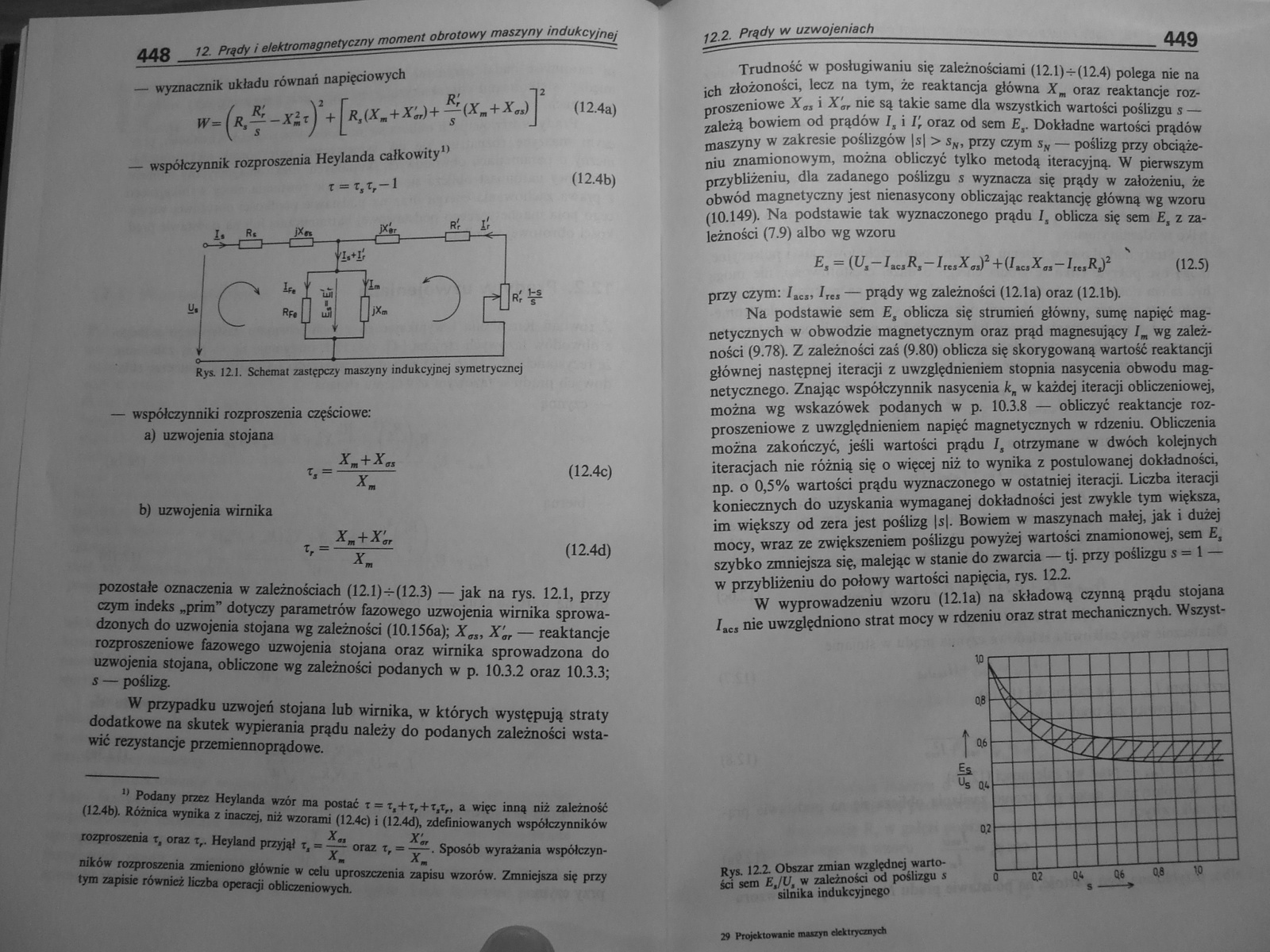
Rys. 12.1. Schemal zastępczy maszyny indukcyjnej symetrycznej
— współczynniki rozproszenia częściowe: a) uzwojenia stojana
(12.4c)
b) uzwojenia wirnika
Xm+X'„ ' Xa
(12.4d)
pozostałe oznaczenia w zależnościach (12.1)-r(12.3) — jak na rys. 12.1, przy czym indeks „prim” dotyczy parametrów fazowego uzwojenia wirnika sprowadzonych do uzwojenia stojana wg zależności (10.156a); X„, X'„ — reaktancje rozproszeniowe fazowego uzwojenia stojana oraz wirnika sprowadzona do uzwojenia stojana, obliczone wg zależności podanych w p. 10.3.2 oraz 10.3.3; s — poślizg.
W przypadku uzwojeń stojana lub wirnika, w których występują straty dodatkowe na skutek wypierania prądu należy do podanych zależności wstawić rezystancje przemiennoprądowe.
" Podany przez Heylanda wzór ma postać | jg t,+T,+T,t„ a więc inną niż zależność (12.4b). Różnica wynika z inaczej, niż wzorami (12-4c) i (12.4d), zdefiniowanych współczynników
x
rozproszenia ra oraz xf. Hey land przyjął tg * oraz xr >
X'
* Sposób wyrażania współczyn-
ników rozproszenia zmieniono głównie w celu uproszczenia zapisu wzorów. Zmniejsza się przy tym zapisie również liczba operacji obliczeniowych.
Trudność w posługiwaniu się zależnościami (12.1)-^(12.4) polega nie na ich złożoności, lecz na tym, że reaktancja główna Xm oraz reaktancje rozproszeniowe X„ i X'„ nie są takie same dla wszystkich wartości poślizgu s — zależą bowiem od prądów /, i l'r oraz od sem E,. Dokładne wartości prądów maszyny w zakresie poślizgów |s| > s„, przy czym s„ — poślizg przy obciążeniu znamionowym, można obliczyć tylko metodą iteracyjną. W pierwszym przybliżeniu, dla zadanego poślizgu s wyznacza się prądy w założeniu, że obwód magnetyczny jest nienasycony obliczając reaktancję główną wg wzoru (10.149). Na podstawie tak wyznaczonego prądu 1, oblicza się sem E, z zależności (7.9) albo wg wzoru
E. = (U,-I,c,R,-I,„Xa,)2 (12.5)
przy czym: — prądy wg zależności (12.1a) oraz (lllb).
Na podstawie sem E, oblicza się strumień główny, sumę napięć magnetycznych w obwodzie magnetycznym oraz prąd magnesujący lm wg zależności (9.78). Z zależności zaś (9.80) oblicza się skorygowaną wartość reaktancji głównej następnej iteracji z uwzględnieniem stopnia nasycenia obwodu magnetycznego. Znając współczynnik nasycenia k, w każdej iteracji obliczeniowej, można wg wskazówek podanych w p. 10.3.8 — obliczyć reaktancje rozproszeniowe z uwzględnieniem napięć magnetycznych w rdzeniu. Obliczenia można zakończyć, jeśli wartości prądu /, otrzymane w dwóch kolejnych iteracjach nie różnią się o więcej niż to wynika z postulowanej dokładności, np. o 0,5% wartości prądu wyznaczonego w ostatniej iteracji. Liczba iteracji koniecznych do uzyskania wymaganej dokładności jest zwykle tym większa, im większy od zera jest poślizg |s|. Bowiem w maszynach małej, jak i dużej mocy, wraz ze zwiększeniem poślizgu powyżej wartości znamionowej, sem E, szybko zmniejsza się, malejąc w stanie do zwarcia — tj. przy poślizgu s = 1 — w przybliżeniu do połowy wartości napięcia, rys. \12.
W wyprowadzeniu wzoru (12.1a) na składową czynną prądu stojana /,CJ nie uwzględniono strat mocy w rdzeniu oraz strat mechanicznych. Wszyst-
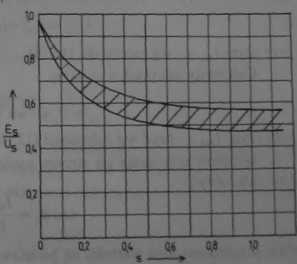
Ry*. 1X2. Obszar zmian względnej wartości sem BJU, w zależności od poślizgu s silnika indukcyjnego
39 Projektowanie muzyn elektrycznych
Wyszukiwarka
Podobne podstrony:
456 (10) 450 12. Prądy i elektromagnetyczny moment obrotowy maszyny indukcyjny 450
458 (10) 458. 12. Prądy i elektromagnetyczny moment obrotowy maszyny indukcyjnej Prądy w uzwojeniach
460 (8) ĄgQ 12. Prądy i elektromagnetyczny moment obrotowy maszyny indukcyjnej Dokładne wartości prą
464 (8) 464 _ 12. Prądy i elektromagnetyczny moment obrotowy maszyny indukcyjnej Zależność (12.5U) j
478 (6) 478 _ 12. Prądy i elektromagnetyczny moment obrotowy maszyny indukcyjnej poślizgowi s„ przyr
482 (6) 482 _ 12. Prądy i elektromagnetyczny moment obrotowy maszyny indukcyjnej Rys. 12.9. Statyczn
486 (7) 486 _ 12. Prądy i elektromagnetyczny moment obrotowy maszyny indukcyjnej 486 _ 12. Prądy i e
DSCF1274 ĄjĄ 12, Prądy i elektromagnetyczny moment obrotowy maszyny indukcyjnej V" X (i+a,,a
446 (11) PRĄDY I ELEKTROMAGNETYCZNY MOMENT OBROTOWY MASZYNY INDUKCYJNEJ ____12.1. Wprowadzenie
454 (8) 454 _ 12. Prądy i e/ektromagnetyczny moment obrotowy maszyny indukcyjnej 454 _ 12. Prądy i e
472 (8) 472 /■?- Prądy i elektromagnetyczny moment obrotowy maszyny indukcyjnej Re
476 (6) A7ft 12. PftdY i elektromagnetyczny moment obrotowy maszyny indukcyjnej A7ft 12. PftdY i ele
480 (7) 4gQ 12. Prądy i tkktromignetyuny moment obrotowy maszyny indukcyjnej a po uwzględnieniu zale
484 (7) 4£4 12 Pwfr i elektromagnetyczny moment obrotowy maszyny indukcyjnej Poszc
450 (11) 45O 12 Prą(ty L elektromagnetyczny moment obrotowy maszyny indukcyjnej kie składniki tych s
462 (8) 452 IZ Prądy i aMctmmagnetyczny moment obrotowy maszyny indukcyjnej 12.6.2. Silnik o wirniku
488 (7) 488 13 Prądy i elektromagnetyczne momenty obrotowe maszyny. U„ — napięcie znamionowe uzwojen
490 (5) 490 13. Prądy i elektromagnetyczne momenty obrotowe maszyny.ii W celu uwzględnienia wpływu s
492 (5) 492_ 13. Prądy i elektromagnetyczne momenty obrotowe maszyny mogą wystąpić podczas udarowego
więcej podobnych podstron