464 (8)
464 _ 12. Prądy i elektromagnetyczny moment obrotowy maszyny indukcyjnej
Zależność (12.5U) jest przybliżona, założono w niej bowiem, że rezystancja R, = 0. Wskazuje ona jednak na to, że stosowanie wirników głębokożłob-kowych jest celowe w maszynach o odpowiednio dużej mocy. W maszynie o zbyt malej mocy, w której reaktancja rozproszeniowa stojana jest zbliżona do rezystancji uzwojenia wirnika, zjawisko wypierania prądu pogarsza warunki rozruchowe.
Zagadnienie doboru proporcji wyrojarów żłobka do zadanych parametrów rozruchowych można stosunkowo'prosto przedstawić na przykładzie wirnika klatkowego z prętami miedzianymi prostokątnymi, rys. 7.17e. Rezystancja oraz reaktancja pręta w takim wirniku przy częstotliwości prądu 50 Hz spełnia bowiem warunek wyrażony zależnością (10.121). Zatem impedancja uzwojenia wirnika przy poślizgu s = 1
Z^ = R;+R^+j(X^+X^) = R;+jX^+(l+j)R^ (12.52a)
Przyjmując ponadto, że współczynniki rozproszenia t, = tr = 1 — co jest w maszynach dużej mocy tylko niewielkim uproszczeniem — otrzymuje się wyrażenie na impedancję silnika
(12.52b)
Parametr R^, przedstawia rezystancję części pręta umieszczonej w żłobku, sprowadzoną do uzwojenia stojana; więc

(12.52c)
przy czym: kK — współczynnik wzrostu rezystancji na skutek wypierania prądu wg zależności (10.120a), albo — przy wartości parametru { < 2 — wg funkcji (10i3afc lf — długość pręta w żłobku; hpr i f>pr — wymiary pręta, jak na rys. 7.17e; RJ*, — rezystancja stałoprądowa pręta sprowadzona do uzwojenia stojana.
Zakładając, że wartości rezystancji R, oraz Rpri, jak również reaktancji X„ oraz X'm są już obliczone tak, żeby silnik przy obciążeniu znamionowym spełniał wymagania co do sprawności i współczynnika mocy, można zależność (12.52b) zapisać w postaci funkcji zależnej od kR
(12.53a)
(12.53b)
(12.53c)
Za ~ A+kgB
w której stałe wektory na płaszczyźnie liczb zespolonych
i 1 «.+R;+j(x„+xu)
8*0 + j) RJw<
Prąd rozruchowy początkowy

(12.54)
oraz moment obrotowy rozruchowy początkowy
(1155)
Af - w* r/t
30
są tylko funkcjami współczynnika kK. Przy k, > 2 współczynnik ten jest równy wysokości pręta h,,, w cm — zależność (10.120a). Nie można więc tak dobrać wymiarów pręta o zadanej rezystancji stałoprądowej, żeby spełnić dwa niezależnie zadane warunki: co do prądu i co do momentu obrotowego rozruchowego. Można natomiast poszukiwać wymiarów pręta prostokątnego zapewniającego największy możliwy do uzyskania wskaźnik dobroci rozruchu. Zagadnienie to dla pręta prostokątnego jest rozważane w pracy [4], a dla pręta o przekroju trapezowym według rys. 7.17g — w pracy [113].
12.7. Obliczanie silnika o wirniku dwuklatkowym
12.7.1. Obliczanie parametrów użytkowych
Istnieje kilka odmian struktury uzwojeń wirników dwuklatkowych różniących się wzajemnym położeniem prętów klatki oraz liczbą pierścieni zwierających. Pręty klatki rozruchowej oraz klatki roboczej mogą znajdować się we wspólnych bobkach — rys. 7.18a, e, f lub w żłobkach sąsiednich — rys. 7.18b, c, d, g, h. W tym drugim przypadku można w uzasadnionych okolicznościach zastosować inną liczbę prętów w uzwojeniu roboczym niż w uzwojeniu rozruchowym. Pierścienie zwierające zaś mogą być dla obu klatek wspólne albo oddzielne. Pręty robocze ponadto mogą być umieszczone w żłobkach głębokich tak, że występuje w nich zjawisko wypierania prądu — rys. 7.18a, b, h.
Zjawiska w silniku dwuklatkowym, niezależnie od struktury uzwojeń wirnika można rozpatrywać na podstawie takiego samego schematu zastępczego. W schemacie przedstawionym na rys. 117 reaktancję wzajemną Xjf
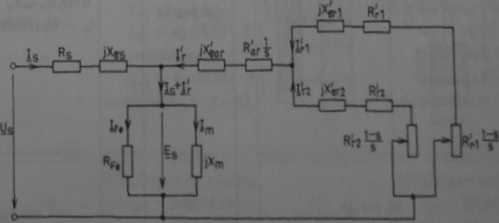
Rys. 12.7. Schcmul zastępczy maszyny indukcyjnej symetrycznej o wirniku dwuklatkowym. roak-uncja wzajemna między uzwojeniami klatkowymi uwzględniona w parametrze
Wyszukiwarka
Podobne podstrony:
446 (11) PRĄDY I ELEKTROMAGNETYCZNY MOMENT OBROTOWY MASZYNY INDUKCYJNEJ ____12.1. Wprowadzenie
448 (9) 448 _ 12. Prądy i elektromagnetyczny moment obrotowy maszyny indukcyjnej wyznacznik układu r
456 (10) 450 12. Prądy i elektromagnetyczny moment obrotowy maszyny indukcyjny 450
458 (10) 458. 12. Prądy i elektromagnetyczny moment obrotowy maszyny indukcyjnej Prądy w uzwojeniach
460 (8) ĄgQ 12. Prądy i elektromagnetyczny moment obrotowy maszyny indukcyjnej Dokładne wartości prą
478 (6) 478 _ 12. Prądy i elektromagnetyczny moment obrotowy maszyny indukcyjnej poślizgowi s„ przyr
482 (6) 482 _ 12. Prądy i elektromagnetyczny moment obrotowy maszyny indukcyjnej Rys. 12.9. Statyczn
486 (7) 486 _ 12. Prądy i elektromagnetyczny moment obrotowy maszyny indukcyjnej 486 _ 12. Prądy i e
DSCF1274 ĄjĄ 12, Prądy i elektromagnetyczny moment obrotowy maszyny indukcyjnej V" X (i+a,,a
472 (8) 472 /■?- Prądy i elektromagnetyczny moment obrotowy maszyny indukcyjnej Re
450 (11) 45O 12 Prą(ty L elektromagnetyczny moment obrotowy maszyny indukcyjnej kie składniki tych s
454 (8) 454 _ 12. Prądy i e/ektromagnetyczny moment obrotowy maszyny indukcyjnej 454 _ 12. Prądy i e
462 (8) 452 IZ Prądy i aMctmmagnetyczny moment obrotowy maszyny indukcyjnej 12.6.2. Silnik o wirniku
476 (6) A7ft 12. PftdY i elektromagnetyczny moment obrotowy maszyny indukcyjnej A7ft 12. PftdY i ele
480 (7) 4gQ 12. Prądy i tkktromignetyuny moment obrotowy maszyny indukcyjnej a po uwzględnieniu zale
484 (7) 4£4 12 Pwfr i elektromagnetyczny moment obrotowy maszyny indukcyjnej Poszc
488 (7) 488 13 Prądy i elektromagnetyczne momenty obrotowe maszyny. U„ — napięcie znamionowe uzwojen
490 (5) 490 13. Prądy i elektromagnetyczne momenty obrotowe maszyny.ii W celu uwzględnienia wpływu s
492 (5) 492_ 13. Prądy i elektromagnetyczne momenty obrotowe maszyny mogą wystąpić podczas udarowego
więcej podobnych podstron