2tom193
5. MASZYNY ELEKTRYCZNE 388
Komutator elektroniczny powinien przełączać cewki uzwojenia twornika w taki sposób, aby pomiędzy wirującą osią pola magneśnicy i osią pola stojana (twornika) kąt przesunięcia przestrzennego pozostawał stały i wynosił n/2. Podobnie jest w maszynie z komutatorem mechanicznym, co odpowiada maksymalnej wartości momentu elektromagnetycznego. Przy dużej liczbie cewek uzwojenia (w klasycznych silnikach prądu stałego większych mocy) i dużej liczbie działek komutatora jest to łatwe. Przy małej liczbie cewek (np. trzech lub czterech) można mówić co najwyżej o tym, że pola twornika i magneśnicy są średnio przesunięte względem siebie o it/2 — stąd pulsacjc momentu.
Do łączników tranzystorowych musi więc być dostarczana informacja o położeniu magneśnicy. Wykrywacz położenia wirnika składa się z impulsatora (w mikrosilnikach jest to najczęściej, np. nieco dłuższy w stosunku do stojana, magnes wirnika) i rozmieszczonych na stojanie czujników. Może on być rozwiązany w oparciu o fotoelementy, kontaktrony. czujniki pojemnościowe, indukcyjne, transformatorowe, a w mikrosilnikach najczęściej przez czujniki Halla, tzw. hallotrony. Informacja o położeniu wirnika zostaje przekazana do układu sterowania powodując zmianę stanu (wysterowanie lub zablokowanie) odpowiednich łączników uzwojenia twornika. Wywołuje to zmianę kierunku prądów w poszczególnych cewkach uzwojenia tak, aby średni kąt przesunięcia osi pól stojana i wirnika wynosił n/2. W [5.20] opisano szczegółowo rozwiązania komutatorów elektronicznych oraz podano zależność charakterystyk eksploatacyjnych, wykorzystania materiałów, liczby czujników położenia i tranzystorów mocy w zależności od rodzaju połączeń uzwojeń stojana.
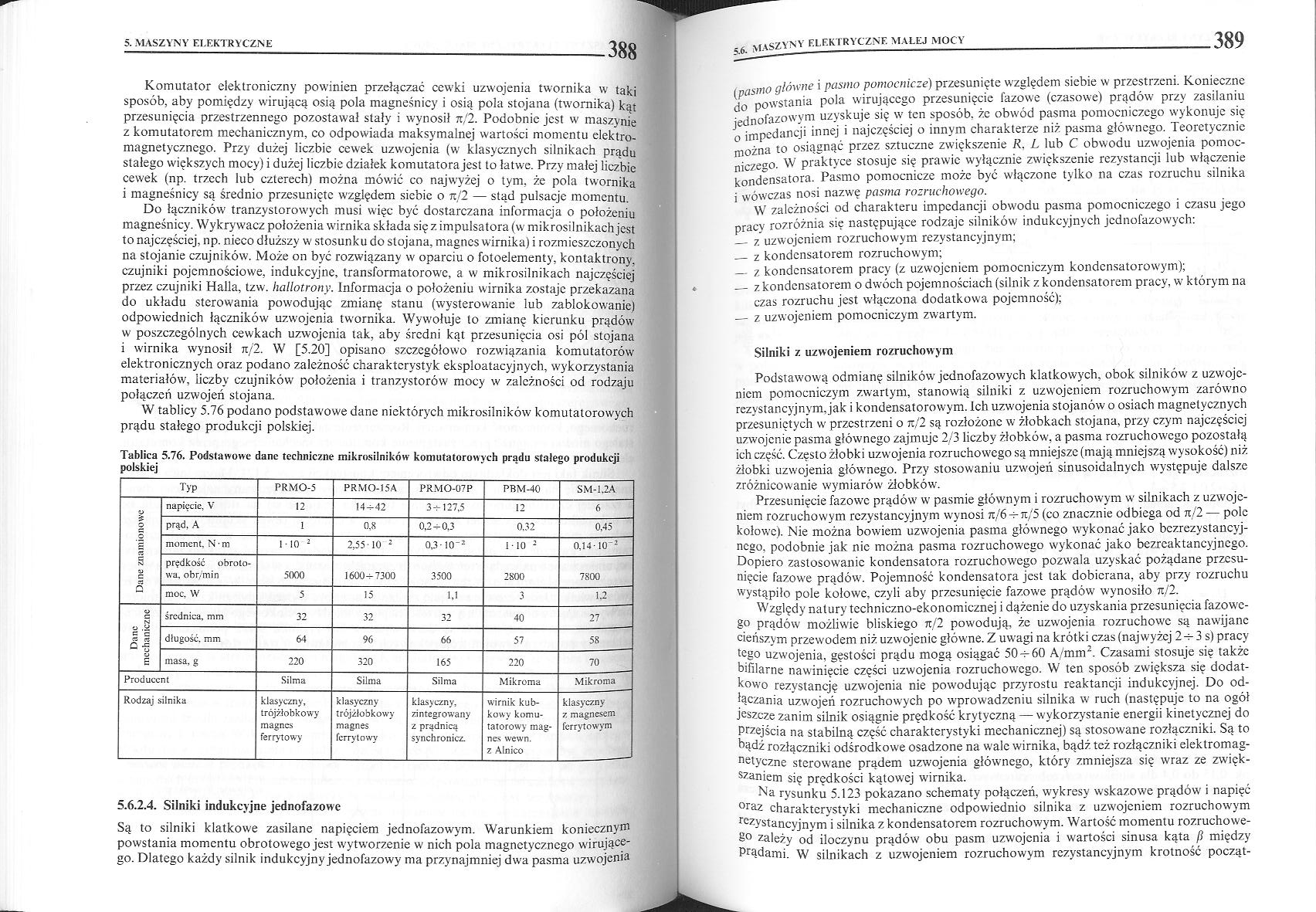
W tablicy 5.76 podano podstawowe dane niektórych mikrosilników komutatorowych prądu stałego produkcji polskiej.
Tablica 5.76. Podstawowe dane techniczne mikrosilników komutatorowych prądu stałego produkcji polskiej
|
Typ |
PRMO-5 |
PRMO-15A |
PRMO-07P |
PBM-40 |
SM-1.2A | |
|
O £ O .5 5 c a> Q |
napięcie, V |
12 |
14-42 |
3-127,5 |
12 |
6 |
|
prąd. A |
1 |
0,8 |
0,2+0,3 |
0.32 |
0.45 | |
|
moment, N • m |
110 2 |
2,55-10 2 |
0,3-10"2 |
110 2 |
0,14- tO-2 | |
|
prędkość obrotowa, obr/min |
5000 |
1600 + 7300 |
3500 |
2800 |
7800 | |
|
moc, W |
5 |
15 |
U |
3 |
1.2 | |
|
Dane mechaniczne |
średnica, mm |
32 |
32 |
32 |
40 |
27 |
|
długość, mm |
64 |
96 |
66 |
57 |
58 | |
|
masa, g |
220 |
320 |
165 |
220 |
70 | |
|
Producent |
Silma |
Silma |
Silma |
Mikroma |
Mikroma | |
|
Rodzaj silnika |
klasyczny, trójżłobkowy magnes ferrytowy |
klasyczny trójżłobkowy magnes ferrytowy |
klasyczny, zintegrowany z prądnicą synchronicz. |
wirnik kubkowy komutatorowy magnes wewn. z Alnico |
klasyczny z magnesem ferrytowym | |
S.6.2.4. Silniki indukcyjne jednofazowe
Są to silniki klatkowe zasilane napięciem jednofazowym. Warunkiem koniecznym powstania momentu obrotowego jest wytworzenie w nich pola magnetycznego warujące-go. Dlatego każdy silnik indukcyjny jednofazowy ma przynajmniej dwa pasma uzwojenia
m0 główne i pasmo pomocnicze) przesunięte względem siebie w przestrzeni. Konieczne do powstania pola wirującego przesunięcie fazowe (czasowe) prądów przy zasilaniu ■ [lnofazowym uzyskuje się w ten sposób, żc obwód pasma pomocniczego wykonuje się
0 impedancji innej i najczęściej o innym charakterze niż pasma głównego. Teoretycznie można to osiągnąć przez sztuczne zwiększenie R. L lub C obwodu uzwojenia pomocniczego. W praktyce stosuje się prawic wyłącznie zwiększenie rezystancji lub włączenie kondensatora. Pasmo pomocnicze może być włączone tylko na czas rozruchu silnika
1 wówczas nosi nazwę pasma rozruchowego.
W zależności od charakteru impedancji obwodu pasma pomocniczego i czasu jego pracy rozróżnia się następujące rodzaje silników indukcyjnych jednofazowych:
__z" uzwojeniem rozruchowym rezystancyjnym;
_z kondensatorem rozruchowym;
— z kondensatorem pracy (z uzwojeniem pomocniczym kondensatorowym);
_z kondensatorem o dwóch pojemnościach (silnik z kondensatorem pracy, w którym na
czas rozruchu jest włączona dodatkowa pojemność);
— z uzwojeniem pomocniczym zwartym.
Silniki z uzwojeniem rozruchowym
Podstawową odmianę silników jednofazowych klatkowych, obok silników' z uzwojeniem pomocniczym zwartym, stanowią silniki z uzwojeniem rozruchowym zarówno rezystancyjnym,jak i kondensatorowym. Ich uzwojenia stojanów o osiach magnetycznych przesuniętych w' przestrzeni o jt/2 są rozłożone w żłobkach stojana, przy czym najczęściej uzwojenie pasma głównego zajmuje 2/3 liczby żłobków, a pasma rozruchowego pozostałą ich część. Często żłobki uzwojenia rozruchowego są mniejsze (mają mniejszą wysokość) niż żłobki uzwojenia głównego. Przy stosowaniu uzwojeń sinusoidalnych występuje dalsze zróżnicowanie wymiarów żłobków.
Przesunięcie fazowe prądów w paśmie głównym i rozruchowym w silnikach z uzwojeniem rozruchowym rezystancyjnym wynosi ji/6-mi/5 (co znacznie odbiega od ji/2 — pole kołowe). Nie można bowiem uzwojenia pasma głównego wykonać jako bczrezystancyj-nego. podobnie jak nic można pasma rozruchowego wykonać jako bezreaktaneyjnego. Dopiero zastosowanie kondensatora rozruchowego pozwala uzyskać pożądane przesunięcie fazowe prądów. Pojemność kondensatora jest tak dobierana, aby przy rozruchu wystąpiło pole kołowe, czyli aby przesunięcie fazowe prądów wynosiło n/2.
Względy natury techniczno-ekonomicznej i dążenie do uzyskania przesunięcia fazowego prądów możliwie bliskiego n/2 powodują, że uzwojenia rozruchowe są nawijane cieńszym przewodem niż. uzwojenie główne. Z uwagi na krótki czas (najwyżej 2-^3 s) pracy tego uzwojenia, gęstości prądu mogą osiągać 50-^60 A/mm2. Czasami stosuje się także bifilarne nawinięcie części uzwojenia rozruchowego. W ten sposób zwiększa się dodatkowe rezystancję uzwojenia nie powodując przyrostu reaktancji indukcyjnej. Do odłączania uzwojeń rozruchowych po wprowadzeniu silnika w ruch (następuje to na ogół jeszcze zanim silnik osiągnie prędkość krytyczną — wykorzystanie energii kinetycznej do Przejścia na stabilną część charakterystyki mechanicznej) są stosowane rozłączniki. Są to bądź rozłączniki odśrodkowe osadzone na w'alc wirnika, bądź też rozłączniki elektromagnetyczne sterowane prądem uzwojenia głównego, który zmniejsza się wraz ze zwiększaniem się prędkości kątowej wirnika.
Na rysunku 5.123 pokazano schematy połączeń, wykresy wskazowe prądów i napięć °raz charakterystyki mechaniczne odpowiednio silnika z uzwojeniem rozruchowym rezystancyjnym i silnika z kondensatorem rozruchowym. Wartość momentu rozruchowego zależy od iloczynu prądów obu pasm uzwojenia i wartości sinusa kąta p między Prądami. W silnikach z uzwojeniem rozruchowym rezystancyjnym krotność począt-
Wyszukiwarka
Podobne podstrony:
2tom190 5. MASZYNY ELEKTRYCZNE 382 Rys. 5.113. Układ połączeń silnika bocznikowego Rys. 5.114. Kszta
2tom191 5. MASZYNY ELEKTRYCZNE 384 Jeżeli <5 oznacza kąt zawarty miedzy osią szczotek a osią magn
2tom192 5. MASZYNY ELEKTRYCZNE 386 Rys. 5.119. Sposoby magnesowania magnesów segmentowych i pierście
2tom195 5. MASZYNY ELEKTRYCZNE 392 wartości dotyczą silników z górnego przedziału mocy. Na podstawie
2tom196 5. MASZYNY ELEKTRYCZNE 394 trójfazowej, jak i jednofazowej. Mają one symetryczne uzwojenie t
2tom197 5. MASZYNY ELEKTRYCZNE 396 Napięcia indukowane międzypasmowe rzeczywiście mierzalne (punkt g
2tom198 S. MASZYNY ELEKTRYCZNE 398 Rys. 5.131. Układ nadążny W— wzmacniacz, SW— silnik wykonawczy, p
2tom199 5. MASZYNY ELEKTRYCZNE 400 — konstrukcję trójkąta prostokątnego; —
2tom171 5. MASZYNY ELEKTRYCZNE 344 Pojemność dynamiczna obwodu twornika maszyny przy zmiennej prędko
2tom224 5. MASZYNY ELEKTRYCZNE 4505.7.9. Próba izolacji uzwojeń Zasady przeprowadzania prób izolacji
2tom226 5. MASZYNY ELEKTRYCZNE -454 — rezystancja izolacji uzwojeń silników J grup
elektromechaniczny. Maszyny elektryczne z komutatorem elektromechanicznym zasilane prądem stałym naz
2tom172 5. MASZYNY ELEKTRYCZNE 346 komutatorze i uszkodzić maszynę. Skutecznym sposobem przeciwdział
2tom134 5. MASZYNY ELEKTRYCZNE 270 Za pomocą przełącznika gwiazda-trójkąt załącza się tylko silniki
2tom163 5. MASZYNY ELEKTRYCZNE uwzględniając początkowy moment rozruchowy MIATr,jaki powinien być ro
2tom173 5. MASZYNY ELEKTRYCZNE 348 We współczesnych maszynach okres komutacji Tc = 10~3-^10~4 s. Śre
Moduł 724[01].Z3 Maszyny elektryczne i układy napędowe 216 724[01].Z3.01 Eksploatowanie
więcej podobnych podstron