2tom199
5. MASZYNY ELEKTRYCZNE 400
— konstrukcję trójkąta prostokątnego;
— tworzenie precyzyjnych iączy synchronicznych typu selsynowych;
— wytwarzanie sygnału o stałym module i o fazie proporcjonalnej do kąta położenia wirnika (TPK — przesuwnik fazowy).
Błędy odwzorowania są obliczane jako największa różnica rzędnych napięcia wyjściowego i idealnego przebiegu (np. idealnej sinusoidy) w odniesieniu do amplitudy przebiegu odwzorowywanego. W wykonaniach standardowych mieszczą się one w granicach 0,01 -^0,25%, co odpowiada błędom kątowym 15"5', przy czym najmniejsze błędy mają TPK wielobiegunowe. Wymagają więc najlepszych materiałów i najwyższej precyzji wykonania.
Klasyczne konstrukcje mają użłobkowane pakiety slojana i wirnika z permaloju (poniżej progu nasycenia) lub niskostratnej blachy transformatorowej. W żłobkach slojana i wirnika są rozłożone sinusoidalne uzwojenia symetryczne dwupasmowe (p = l) parami identyczne i o osiach wzajemnie prostopadłych. Uzwojenie wirnika może być wyprowadzone przez: pierścienie i szczotki, transformator pierścieniowy (TPK bezzes-tykowy) lub przewodem giętkim przy ograniczonym kącie obrotu.
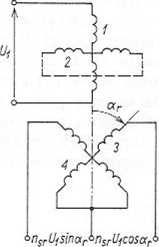
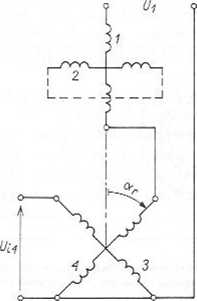
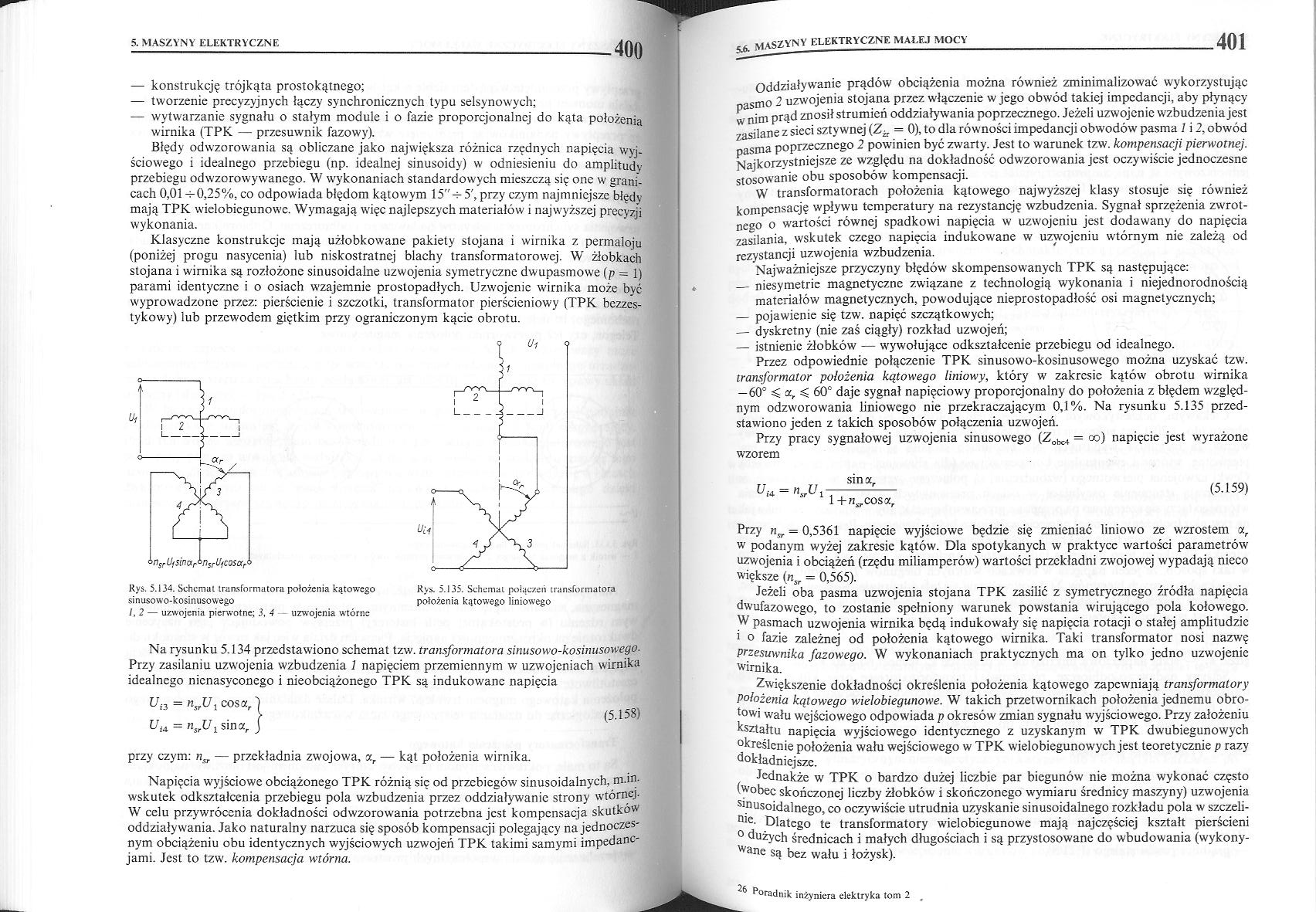
Rys. 5.134. Schemat transformatora położenia kątowego Rys. 5.135. Schemat połączeń transformatora
sinusowo-kosinusowego położenia kątowego liniowego
1,2 — uzwojenia pierwotne; 3, 4 uzwojenia wtórne
Na rysunku 5.134 przedstawiono schemat tzw. transformatora sinusowo-kosinusowego. Przy zasilaniu uzwojenia wzbudzenia 1 napięciem przemiennym w uzwojeniach wirnika idealnego nienasyconego i nieobciążonego TPK są indukowane napięcia
Ui3 = riM, cos z,)
5 [ (5.158)
U14 = nsrUx sina, J
przy czym: n„ — przekładnia zwojowa, a, — kąt położenia wirnika.
Napięcia wyjściowe obciążonego TPK różnią się od przebiegów sinusoidalnych, m.m-wskutek odkształcenia przebiegu pola wzbudzenia przez oddziaływanie strony wtórnej. W celu przywrócenia dokładności odwzorowania potrzebna jest kompensacja skutków' oddziaływania. Jako naturalny narzuca się sposób kompensacji polegający na jednoczesnym obciążeniu obu identycznych wyjściowych uzwojeń TPK takimi samymi impedanc-janii. Jest to tzw. kompensacja wtórna.
Oddziaływanie prądów obciążenia można również zminimalizować wykorzystując mo 2 uzwojenia stojana przez włączenie w jego obwód takiej impcdancji, aby płynący vv nim prąd znosił strumień oddziaływania poprzecznego. Jeżeli uzwojenie wzbudzenia jest zasilane z sieci sztywnej (Z.h = 0), to dla równości impedancji obwodów pasma 1 i 2, obwód nasma poprzecznego 2 powinien być zwarty. Jest to warunek tzw. kompensacji pierwotnej. Najkorzystniejsze ze względu na dokładność odwzorowania jest oczywiście jednoczesne stosowanie obu sposobów kompensacji.
W transformatorach położenia kątowego najwyższej klasy stosuje się również kompensację wpływu temperatury na rezystancję wzbudzenia. Sygnał sprzężenia zwrotnego o wartości równej spadkowi napięcia w uzwojeniu jest dodawany do napięcia zasilania, wskutek czego napięcia indukowane w uzwojeniu wtórnym nie zależą od rezystancji uzwojenia wzbudzenia.
Najważniejsze przyczyny błędów skompensowanych TPK są następujące:
_niesymetrie magnetyczne związane z technologią wykonania i niejednorodnością
materiałów magnetycznych, powodujące nieprostopadłość osi magnetycznych;
— pojawienie się tzw. napięć szczątkowych;
— dyskretny (nie zaś ciągły) rozkład uzwojeń;
— istnienie żłobków — wywołujące odkształcenie przebiegu od idealnego.
Przez odpowiednie połączenie TPK sinusowo-kosinusowego można uzyskać tzw. transformator położenia kątowego liniowy, który w zakresie kątów obrotu wirnika —60° ^ a, < 60° daje sygnał napięciowy proporcjonalny do położenia z błędem względnym odzworowania liniowego nie przekraczającym 0,1%. Na rysunku 5.135 przedstawiono jeden z takich sposobów połączenia uzwojeń.
Przy pracy sygnałowej uzwojenia sinusowego (Zobc4 = oo) napięcie jest wyrażone wzorem
l+nCTcosa,
(5.159)
Przy n9r = 0,5361 napięcie wyjściowe będzie się zmieniać liniowo ze wzrostem ocr w podanym wyżej zakresie kątów. Dla spotykanych w praktyce wartości parametrów uzwojenia i obciążeń (rzędu miliamperów) wartości przekładni zwojowej wypadają nieco większe (nST = 0,565).
Jeżeli oba pasma uzwojenia stojana TPK zasilić z symetrycznego źródła napięcia dwufazowego, to zostanie spełniony warunek powstania wirującego pola kołowego. W pasmach uzwojenia wirnika będą indukowały się napięcia rotacji o stałej amplitudzie 1 o fazie zależnej od położenia kątowego wirnika. Taki transformator nosi nazwę przesuwnika fazowego. W wykonaniach praktycznych ma on tylko jedno uzwojenie wirnika.
Zwiększenie dokładności określenia położenia kątowego zapewniają transformatory położenia kątowego wielobiegunowe. W takich przetwornikach położenia jednemu obrotowi wału wejściowego odpowiada p okresów zmian sygnału wyjściowego. Przy założeniu kształtu napięcia wyjściowego identycznego z uzyskanym w TPK dwubiegunowych określenie położenia wału wejściowego w TPK wielobicgunowych jest teoretycznie p razy dokładniejsze.
Jednakże w TPK o bardzo dużej liczbie par biegunów' nie można wykonać często (wobec skończonej liczby żłobków i skończonego wymiaru średnicy maszyny) uzwojenia sinusoidalnego, co oczywiście utrudnia uzyskanie sinusoidalnego rozkładu pola w szczeli-nie- Dlatego te transformatory wielobiegunowe mają najczęściej kształt pierścieni 0 dużych średnicach i małych długościach i są przystosowane do wbudowania (wykonywane są bez wału i łożysk).
26
Poradnik inżyniera elektryka tom 2
Wyszukiwarka
Podobne podstrony:
2tom190 5. MASZYNY ELEKTRYCZNE 382 Rys. 5.113. Układ połączeń silnika bocznikowego Rys. 5.114. Kszta
2tom191 5. MASZYNY ELEKTRYCZNE 384 Jeżeli <5 oznacza kąt zawarty miedzy osią szczotek a osią magn
2tom192 5. MASZYNY ELEKTRYCZNE 386 Rys. 5.119. Sposoby magnesowania magnesów segmentowych i pierście
2tom193 5. MASZYNY ELEKTRYCZNE 388 Komutator elektroniczny powinien przełączać cewki uzwojenia tworn
2tom195 5. MASZYNY ELEKTRYCZNE 392 wartości dotyczą silników z górnego przedziału mocy. Na podstawie
2tom196 5. MASZYNY ELEKTRYCZNE 394 trójfazowej, jak i jednofazowej. Mają one symetryczne uzwojenie t
2tom197 5. MASZYNY ELEKTRYCZNE 396 Napięcia indukowane międzypasmowe rzeczywiście mierzalne (punkt g
2tom198 S. MASZYNY ELEKTRYCZNE 398 Rys. 5.131. Układ nadążny W— wzmacniacz, SW— silnik wykonawczy, p
26 1949 roku zostało powołane w Katowicach Centralne Biuro Konstrukcji Maszyn Elektrycznych zlokaliz
Nazwa modułu Inżynieria samochodowa Przedmioty Podstawy konstrukcji maszyn. Elektronika i
Konstrukcje Maszyn Elektrycznych dr inż. Krzysztof Bieńkowski GpKp.16
Matematyka , Mechanika .Termodynamika, Elektrotechnika, Elektronika, Podstawy konstrukcji maszyn.
Rozdział 1Wprowadzenie 1.1. Konstrukcje i właściwości i maszyn elektrycznych prądu stałego i
2tom110 5. MASZYNY ELEKTRYCZNE 222 Pierwsza cyfra podaje oznaczenie grupy konstrukcyjnej: 1 &n
2tom134 5. MASZYNY ELEKTRYCZNE 270 Za pomocą przełącznika gwiazda-trójkąt załącza się tylko silniki
2tom201 5. MASZYNY ELEKTRYCZNE 404 Rys. 5.137. Zasada konstrukcji podstawowych odmian prądnic tachom
2tom218 5. MASZYNY ELEKTRYCZNE System powstawania maszyn elektrycznych reprezentuje etap konstruowan
więcej podobnych podstron