2tom213
5. MASZYNY ELEKTRYCZNE 428
Tablica 5.79. Dane techniczne mikrosilników synchronicznych jednofazowych produkcji polskiej
|
Typ |
RDR-5 |
SS-8A |
SS-8B |
SS-8C |
SMU-1,6 |
SML’N-1 |
SMM-4 |
|
Napięcie znamionowe. V |
220 |
110/220 |
110/220 |
110/220 |
24/100/110/127/220/380 |
110/220 |
220 |
|
Częstotliwość, Hz |
50 |
50 |
50 |
50 |
50 |
50 |
50 |
|
Moc pobierana, V-A |
50 |
13 |
13 |
13 |
3,2 |
3,5 |
1,9 |
|
Moment rozruchowy, N • m |
3,3-10 2 |
13-tO-2 |
1,2-10" 2 |
0,225 -10-2 |
0,16 -10 2 |
0,65-10'2 |
0,1 -10-2 |
|
Moment utyku, N • m |
3,1 • 10-2 |
13-10"2 |
1,2-10" 2 |
0,225-10~2 |
0,3-10 2 |
1,0-to-2 |
0,25-10-2 |
|
Moment synchroniczny maksymalny, N • m |
5-10 2 |
_ | |||||
|
Moment statyczny w stanie beznapię-ciowym, mN • m |
_ |
0,1 |
0,14 | ||||
|
Prędkość obrotowa, obr/min |
1500 |
1 |
10 |
60 |
375 |
375 |
250 |
|
Długość/średnica, mm |
125/68 |
84/71 |
84/71 |
84/71 |
26/55 |
39/55 |
20/51 |
|
Masa, g |
1150 |
450 |
450 |
450 |
140 |
230 |
80 |
|
Producent |
Mikroraa |
MERA PAFAL |
Świdnica | ||||
|
Uwagi |
reluktancyjny z uzwojeniem pomocniczym kondensatorowym |
histerezowy z pomocniczym uzwojeniem zwartym i przekładnią mechaniczną redukcyjną |
perm asy nowy, wirnik magnes trwały pierścieniowy na 16 biegunów, rozruch drgający ukierunkowany |
s >. —, =5 i y' rj> C E C £ ^ * es s ° -^ 2 2 c 2 = c. R £ -5 |
permasyn 24-bieguno-wy o rozruchu drgającym, ukierunkowany | ||
Silniki skokowe
Wszystkie omówione rodzaje silników synchronicznych, z wyjątkiem silników his-terezow-ych, można wykorzystać jako silniki skokowe. Zasadnicza różnica sprowadza się do innego sposobu zasilania i sterowania ich ruchem. Zasilanie silników synchronicznych zapewnia w szczelinie maszyny pole magnetyczne wirujące (czasami oscylacyjne) i w związku z tym — mniej lub bardziej równomierną prędkość kątową wirnika. W silnikach skokowych układy zasilania i sterowania powodują dyskretne przemieszczanie się wektora pola wypadkowego. Przy dostatecznie małych prędkościach (małych energiach kinetycznych ruchu) odpowiadają im skokowe (o charakterze oscylacyjnym z tłumieniem) przemieszczania się wirnika.
Silnikiem skokowym nazywa się elektromechaniczny przetwornik energii przetwarzający sygnały elektryczne (ciąg impulsów) w mechaniczne przesunięcie kątowe jego walu lub liniowe biegnika.
Kąt obrotu lub przesunięcie liniowe są proporcjonalne do liczby impulsów sterujących, a prędkość przemieszczania się części ruchomej silnika — do częstotliwości tych impulsów. Impuls sterujący powoduje, żc cewki (w przypadku uzwojenia skupionego) lub pasma (w przypadku uzwojenia rozłożonego) uzwojenia silnika zostają za pośrednictwem komutatora elektronicznego zasilone określonym układem napięć. Napięcia te utrzymują . na uzwojeniu na ogól do czasu pojawienia się następnego impulsu powodującego S'^iane układu tych napięć. Zmienia się wskutek tego rozpływ prądu w uzwojeniu i ulega fmianie kierunek strumienia, wywołując obrót wirnika o określony kąt, zwany skokiem.
Dla silnika o danej liczbie pasm uzwojenia istnieje pewna skończona liczba układów napiec zasilających uzwojenie, po przekroczeniu której układy te zaczynają się powtarzać. Każdy z takich układów nosi nazwę taktu komutacji. Tworzą one cykl komutacji, w którym wektor pola w szczelinie obróci się o 2it rad (elektrycznych).
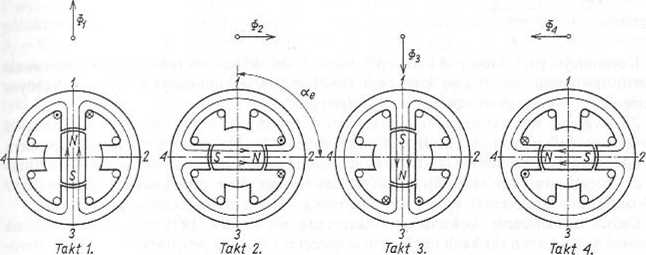
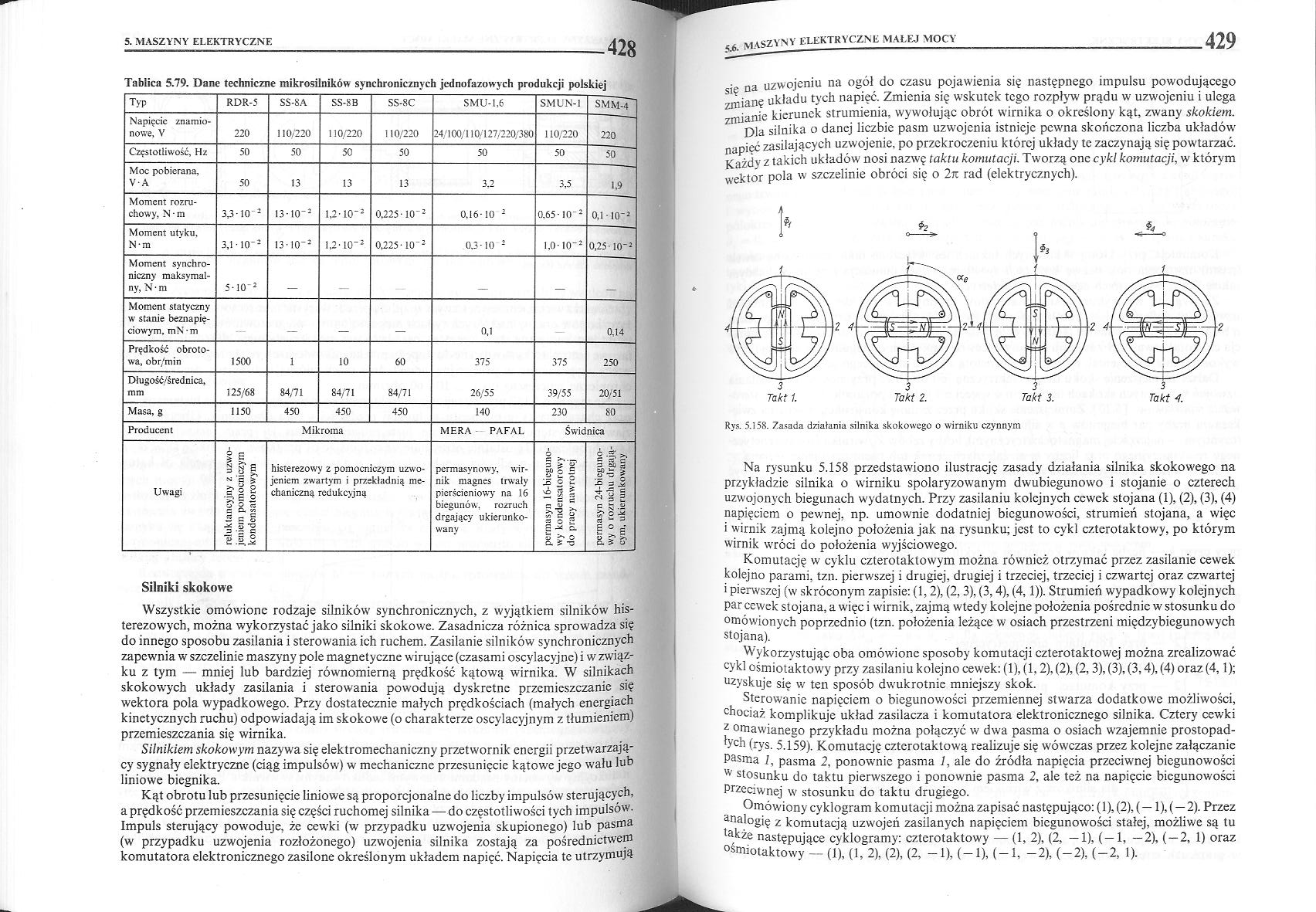
Rys. 5.158. Zasada działania silnika skokowego o wirniku czynnym
Na rysunku 5.158 przedstawiono ilustrację zasady działania silnika skokowego na przykładzie silnika o wirniku spolaryzowanym dwubiegunowo i stojanie o czterech uzwojonych biegunach wydatnych. Przy zasilaniu kolejnych cewek stojana (1), (2), (3), (4) napięciem o pewmej, np. umownie dodatniej biegunowości, strumień stojana, a więc i wirnik zajmą kolejno położenia jak na rysunku; jest to cykl czterotaktowy, po którym wirnik wróci do położenia wyjściowego.
Komutację w cyklu czterotaklowym można również otrzymać przez zasilanie cewek kolejno parami, tzn. pierwszej i drugiej, drugiej i trzeciej, trzeciej i czwartej oraz czwartej
1 pierwszej (w skróconym zapisie: (1,2), (2, 3), (3,4), (4,1)). Strumień wypadkowy kolejnych par cewek stojana, a więc i wirnik, zajmą wtedy kolejne położenia pośrednie w' stosunku do omówionych poprzednio (tzn. położenia leżące w osiach przestrzeni międzybiegunowych stojana).
Wykorzystując oba omówione sposoby komutacji czterotaktowej można zrealizować c>'kl ośmiotaktowy przy zasilaniu kolejno cewek: (1), (1,2), (2), (2, 3), (3), (3,4), (4) oraz (4,1); uzyskuje się w' ten sposób dwmkrotnie mniejszy skok.
Sterowanie napięciem o biegunowości przemiennej stwarza dodatkowe możliwości, chociaż komplikuje układ zasilacza i komutatora elektronicznego silnika. Cztery cewki
2 omawńanego przykładu można połączyć w dwa pasma o osiach wzajemnie prostopadłych (rys. 5.159). Komutację cztcrotaktową realizuje się wówczas przez kolejne załączanie pasma l, pasma 2, ponownie pasma 1, ale do źródła napięcia przeciwnej biegunowości w stosunku do taktu pierwszego i ponownie pasma 2, ale też na napięcie biegunowości Przeciwnej w stosunku do taktu drugiego.
Omówiony cyklogram komutacji można zapisać następująco: (1), (2), (—1),(—2). Przez analogię z komutacją uzwojeń zasilanych napięciem biegunowości stałej, możliwe są tu także następujące cyklogramy: czterotaktowy — (1, 2), (2, —1), (—1, —2), (—2, 1) oraz ośmiotaktowy -- (1), (1, 2), (2), (2, -1), (-1), (-1, -2), (-2), (-2, 1).
Wyszukiwarka
Podobne podstrony:
2tom186 5. MASZYNY ELEKTRYCZNE 374 Tablica 5.71. Dane techniczne niektórych prądnic spawalniczych i
2tom141 5. MASZYNY ELEKTRYCZNE 284 5. MASZYNY ELEKTRYCZNE 284 Tablica 5.40. Dane znamionowe silników
2tom133 5. MASZYNY ELEKTRYCZNE Tablica 5.33. Dane techniczne rozruszników olejowych serii ARf i ARd
2tom202 5. MASZYNY ELEKTRYCZNE 406 Tablica 5.77. Podstawowe dane techniczne niektórych prądnic tacho
10 Stacje t urządzenia,,, Ol Tablica 4.1. Niektóre dane techniczne rozdzielnic osłoniętych z izolacj
318 16. ROZŁĄCZNIE! WYSOKIEGO NAPIĘCIA Tablica 18.1. Dane techniczne rozłączników* produkcji
197 tif 6.1. POTRZEBY WŁASNE STACJI Tablica 5.1. Niektóre dane techniczne ogniw
82510 instalacje174 DODATEK 230 Tablica 12. Dane techniczne reluktancyjnych liniowych silników skoko
318 18. ROZŁĄCZNI*.! WYSOKIEGO NAPIĘCIA Tablica 18.1. Dane techniczne rozłączników* produkcji
5. ROZDZIELNICE NISKICH NAPIĘĆ 1 Tablica 5.10. Dane techniczne rozdzielnic typu RSk, RSb, RES. MS-7
5. ROZDZIELNICE NISKICH NAPIĘĆ 56 Tablica 5.11. Dane techniczne rozdzielnic typu Uniblok wg [5.19] 5
s06 PODZESPOŁY ELEKTRONICZNELECH KOZAK JANUSZ RŻYSKO Dane techniczne elementów półprzewodnikowych
Tablica 22.7. Dane techniczne* bezpieczników przemysłowych stacyjnych o działaniu zwłocznym typu WT
Maszyny elektryczne Materiały dydaktyczne dla kierunku Technik Optyk (W12) Kwalifikacyjnego kursu
więcej podobnych podstron