3tom230
7. SYSTEMY ELEKTROENERGETYCZNE 462
częstotliwość, pozostałe zaś regulują wymianę mocy. Najczęściej jednak w utrzymywaniu częstotliwości biorą udział wszystkie systemy, z wyjątkiem najmniejszych, przy zachowaniu tzw. zasady nieinterwencji. Zasada ta polega na tym, że każdy system pokrywa zmiany obciążenia na swoim terenie i utrzymuje wymianę mocy z systemami sąsiednimi zgodnie z obowiązującym programem. Tej zasadzie odpowiada równanie regulacji
AE = AP„ + kKsAf= 0 (7.66)
w którym: AE — uchyb regulacji, MW; APw — odchylenie wymiany mocy od wartości planowanej, MW; A/ — odchylenie częstotliwości, Hz; — współczynnik regulatora systemowego, MW/Hz.
Warunkiem realizacji zasady nieinterwencji jest równość współczynników kRs regulatorów systemowych. Najlepsze właściwości regulacyjne mają elektrownie wodne. Turbozespoły cieplne dużej mocy z przegrzewem międzystopniowym nie znoszą dużych i szybkich zmian obciążenia. Niedogodność ta jest usuwana przez wykorzystanie do regulacji niemal wszystkich turbozespołów w zakresie ich niewielkiego pasma regulacyjnego w przedziale (5 -h 10%)Pv. W tym zakresie zmiany obciążenia mogą być bardzo szybkie. Dla turbozespołów wodnych przedział ten może być większy. Rozwój sterowania cyfrowego stworzył możliwości stosowania automatyki do regulacji trójnej (trzeciego rzędu), zapewniającej ERO. Przy wąskim przedziale regulacji ERO nie ulega istotnym zmianom.
Można tu przytoczyć układ, zachowujący zasadę nieinterwencji, dla której sygnał regulacyjny R jest formowany zgodnie z zapisem 1 '
R = - fiAG--J AGdt (7.67)
o
w którym łączny uchyb regulacji
AG = AP„„ + sR A/u + ta ^ (7.68)
dr
gdzie: AP„„ — uchyb wymiany mocy; A/„ — uchyb częstotliwości; sR—statyzm regulatora; Tr — stała czasu regulatora; fi — współczynnik proporcjonalności; ta — czas wyprzedzania.
Sygnał R powoduje zmianę obciążenia turbozespołu wg zależności
Pr = P0+*R (7.69)
gdzie: P0 — moc odniesienia nastawiona przez obsługę ruchu; i — współczynnik proporcjonalności.
Układy ARC, pracujące w połączonych systemach Europy Zachodniej, zapewniają uchyb częstotliwości mniejszy niż 0,05 Hz.
Obecnie są stosowane układy elektroniczne, które mają właściwości regulacji pierwotnej i wtórnej. Układy takie reagują na: moc zadaną, statyzm pierwotny, udział w regulacji systemowej wg sygnału, ograniczenia lokalne. Nadają się również do układu regulacji trzeciego rzędu, a także umożliwiają pracę samodzielną wg kryteriów lokalnych.
W Polsce pracuje cyfrowy układ automatycznej regulacji częstotliwości i mocy ARCM (wykorzystywany jest również stary układ analogowy ARC z modulacją częstotliwości sygnału). Układ ARCM obejmuje regulację częstotliwości i mocy wymiany oraz obciążeń (ERO-P) bloków. Regulacja częstotliwości / i mocy wymiany P„ odbywa się w zakresie szybkich zmian obciążenia turbin; regulacja ERO-P — w zakresie zmian powolnych, związanych z regulacją kotłową. Do regulacji mocy wymiany i częstotliwości jest wydzielona określona liczba zespołów, które zmieniają swą moc w zakresie zmian szybkich ±(3-r7%)P, pracując w stanach ustalonych z obciążeniem optymalnym Popl.
Regulator centralny w Krajowe] Dyspozycji Mocy ma zadawane: częstotliwośćf2, moc wymiany Pw. i mocowy równoważnik częstotliwości K. Jako sygnały wchodzą: suma mocy w punktach wymiany Pw i częstotliwość f. Na wyjściach regulatora uzyskuje się: sygnał zmian szybkich y,, sygnał zmian ustalonych punktów pracy y0> sygnał zmian mocy w elektrowniach z ograniczonym paliwem lub zmniejszonymi możliwościami wprowadzenia mocy yf.. Takie same sygnały można uzyskać w komputerze o działaniu bezpośrednim. Sygnał zmian powolnych y0 (ERO-P) jest zmieniany wówczas, gdy sygnał y, przekracza określoną wartość odpowiadającą zakresowi zmian szybkich elektrowni wydzielonych. Analogowy regulator centralny wytwarza jeden sygnał y0 dla wszystkich elektrowni.
W urządzeniach odbiorczych i sterujących poszczególnych zespołów następuje przetworzenie sygnałów y0 i yt w sygnał mocy zadanej P. = Po+P\, zawierający część ustaloną i szybkozmienną; pierwsza wynika z charakterystyki przyrostów względnych elektrowni, druga—z założonego z góry podziału przyrostu mocy A Pobc = A PK + K Af na poszczególne elektrownie. Zakres zmian szybkich w SEE powinien być < 2%Pobc.
Od układów ARCM nie wymaga się dużej szybkości działania; uważa się nawet, że zbyt częste zmiany mocy zespołu są szkodliwe. Dlatego czas od powstania przyrostu A Pobc do jego pokrycia przez elektrownie jest przyjmowany w granicach 10-^30 s. Sygnały regulacyjne są wysyłane w cyklu krótszym niż 1 min, a czas ich transmisji wynosi 1 -=-1,5 s.
7.4.3. Regulacja napięcia
Napięcie jest drugim istotnym regulowanym parametrem jakości energii elektrycznej dostarczanej odbiorcom. Parametr ten jest różny w różnych punktach sieci elektroenergetycznej, co powoduje, że urządzenia regulujące muszą być zainstalowane w całej sieci. Utrzymanie napięcia w pobliżu wartości znamionowej z tolerancją np. +10% jest obowiązkiem dostawcy energii elektrycznej. Wartości dopuszczalne napięć, ujęte normami, są różne dla różnych odbiorników i krajów. Regulacja napięcia wiąże się z bilansem mocy biernej w całym systemie i w poszczególnych jego obszarach. Zbilansowanie mocy biernej całego systemu nie gwarantuje odpowiednich napięć w poszczególnych jego punktach, stąd też bilansowanie mocy biernej jest niezbędne w poszczególnych częściach sieci elektroenergetycznej.
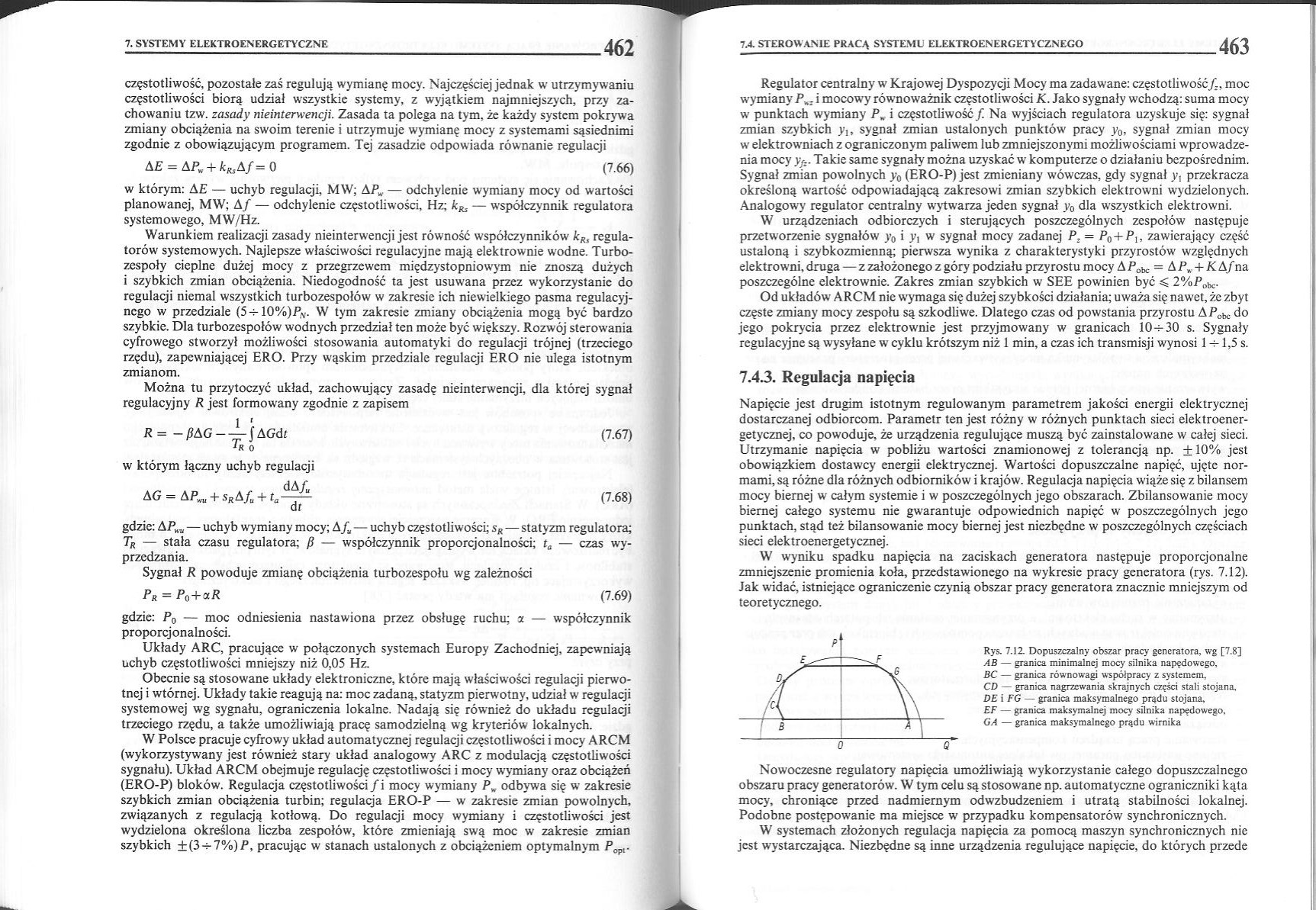
W wyniku spadku napięcia na zaciskach generatora następuje proporcjonalne zmniejszenie promienia koła, przedstawionego na wykresie pracy generatora (rys. 7.12). Jak widać, istniejące ograniczenie czynią obszar pracy generatora znacznie mniejszym od teoretycznego.
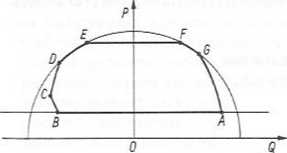
Rys. 7.12. Dopuszczalny obszar pracy generatora, wg [7.8] AB — granica minimalnej mocy silnika napędowego,
BC — granica równowagi współpracy z systemem,
CD — granica nagrzewania skrajnych części stali stojana, DE i FG — granica maksymalnego prądu stojana,
EF — granica maksymalnej mocy silnika napędowego.
GA — granica maksymalnego prądu wirnika
Nowoczesne regulatory napięcia umożliwiają wykorzystanie całego dopuszczalnego obszaru pracy generatorów. W tym celu są stosowane np. automatyczne ograniczniki kąta mocy, chroniące przed nadmiernym odwzbudzeniem i utratą stabilności lokalnej. Podobne postępowanie ma miejsce w przypadku kompensatorów synchronicznych.
W systemach złożonych regulacja napięcia za pomocą maszyn synchronicznych nie jest wystarczająca. Niezbędne są inne urządzenia regulujące napięcie, do których przede
Wyszukiwarka
Podobne podstrony:
3tom231 7. SYSTEMY ELEKTROENERGETYCZNE 464 wszystkim należą transformatory i autotransformatory ze z
3tom232 7. SYSTEMY ELEKTROENERGETY CZNE 466 założenia, że optymalny SEE stanowi zbiór trzech optymal
3tom233 7. SYSTEMY ELEKTROENERGETYCZNE 468 Najszersze rozpowszechnienie w rozwiązywaniu zadań planow
3tom234 7. SYSTEMY ELEKTROENERGETYCZNE 470 7. SYSTEMY ELEKTROENERGETYCZNE 470 Rys. 7.14. Schemat uog
3tom235 7. SYSTEMY ELEKTROENERGETYCZNE 472 7.34. Wytyczne przyłączenia do sieci 11
3tom228 7. SYSTEMY ELEKTROENERGETYCZNE 458 nie dotyczy ruchu wirnika, ale częstotliwości prądu mniej
Układy trójstanowe (logika trójstanowa) W elektronice cyfrowej często spotykamy sytuacje (np. w syst
skanuj0003 (256) 1.1.Automatyczna regulacja mocy i częstotliwości w krajowym systemie elektroenerget
skanuj0006 nością. Te dwa konstrukty: motywacyjny i kognitywny są konceptualnie różne, ale częstokro
img209 209 A COS UJ _t O Z Rys. 1.82. System transmisyjny z kluczowaniem częs
8. Instalacje istniejące (stan) Instalacja elektryczna: częściowo zmodernizowana, pozostała część
Modelowanie elektrowni wiatrowej w systemie elektroenergetycznym w otoczeniu rynkowym
Modelowanie elektrowni wiatrowej w systemie elektroenergetycznym w otoczeniu rynkowym Modelowanie el
więcej podobnych podstron