96134295931774823686
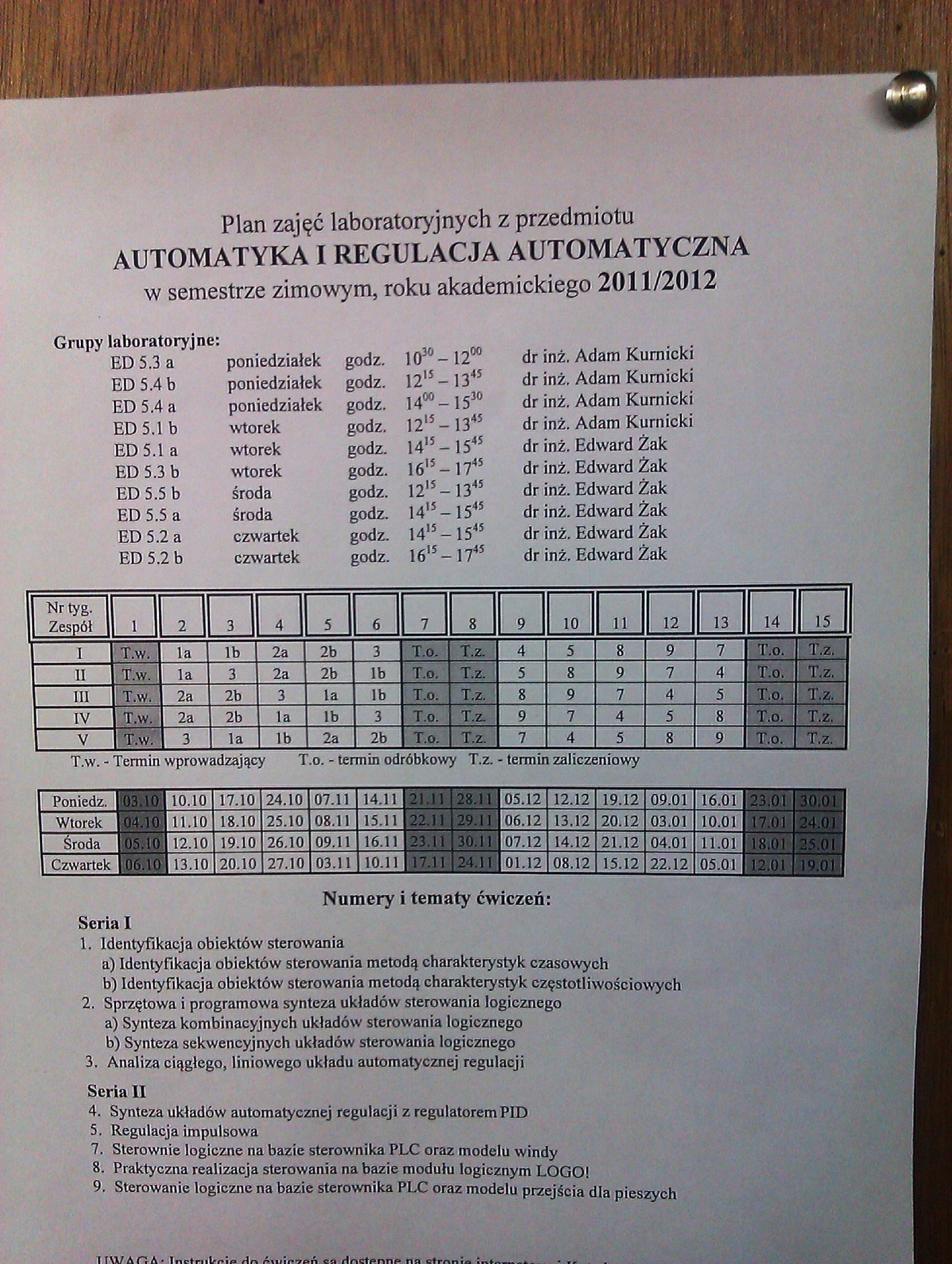
Plan zajęć laboratoryjnych z przedmiotu AUTOMATYKA I REGULACJA AUTOMATYCZNA w semestrze zimowym, roku akademickiego 2011/2012
|
Grupy laboratoryjne: ED 5,3 a |
poniedziałek |
godz. |
|
li 5.4 b |
poniedziałek |
godz. |
|
ED5.4a |
poniedziałek |
godz. |
|
BD 5*1 b |
wtorek |
godz. |
|
iMMla |
wtorek |
godz. |
|
Bi 5.3 b |
wtorek |
godz. |
|
ED 5.5 b |
środa |
godz. |
|
B0 5.5 a |
środa |
godz. |
|
BD 5,2 a |
czwartek |
godz. |
|
Bi 5,2 b |
czwartek |
godz. |
1030 - 1200 dr inź. Adam Kumicki 1215 - 1345 dr inź, Adam Kumicki 1400 — 1530 dr inź, Adam Kumicki
1215 - 1345 dr inź. Adam Kumicki
14,s- 1545 dr inź. Edward Żak 1615 -1745 dr inź, Edward Żak 1215 - 1345 dr inź. Edward Żak 1415- 1545 dr inź. Edward Żak 1415 —1545 dr inź. Edward Żak 1615 — 1 RS dr inź. Edward Żak
|
1 Nrtyg. | Zespół |
1 |
2 |
1 3 |
1 4 | |
5 |
6 |
1 7 |
1 8 |
|| 9 |
1 10 |
i |
1 12 |
l 13 |
|| 14 |
1 |
|
I |
T.w. |
1 la |
Ib |
2a |
2b |
3 |
T.o. |
T.z. |
4 |
5 |
8 |
9 |
7 |
T.o. |
T.z. ] |
|
(II |
i T.w. |
la |
3 |
2a |
2b |
lb |
T.o. |
T.z. |
5 |
8 |
9 |
7 |
i '41 1 |
, T.o. |
i T.z. J |
|
m |
Ili |
2a |
2b |
3 |
la |
lb |
T.o. |
T.z. |
8 |
9 |
7 |
4 |
! 5 I |
TiO, | |
! T.z. |
|
H rv |
L&w. |
2a |
2b |
la |
lb |
3 |
T.o. |
T.z. |
9 i |
7 |
4 |
5 | |
j8!.;i |
! T,q. ! |
T.z. |
|
V |
T.W? |
3 |
la |
lb |
2a |
2b |
T.o. |
T.z. |
7 |
4 |
5 |
8 |
9 |
T.o. |
T.z. | |
T.w. - Termin wprowadzający T.o. - termin odróbkowy T.z. - termin zaliczeniowy
|
Poniedz. |
103.10 |
10.10 |
17.10 |
24.10 |
07.11 |
TuHIH |
28.11 |
05.12 |
12.12 |
19.12 |
09.01 |
16.01 |
ii |
30i01 | |
|
Wtorek |
04.10 |
ićclio |
18.10 |
25.10 |
08.11 |
15.11 |
22.11 |
29.111 |
06.12 |
13.12 |
20.12 |
03.01 |
10.01 |
17.01 |
24.01 |
|
Środa |
D5;I0| |
12.10 |
19.10 |
26.10 |
09.11 |
16.11 |
23.11 |
30.11 |
07.12 |
14.12 |
21.12 |
04.01 |
11.01 |
I8i01 |
2?0l! |
|
Czwartek |
06.10 |
13.10i |
20.10 |
27.10 |
03.11 |
10.11 |
17.11 |
24.11 |
01.12 |
08.12 |
15.12 |
22.12 |
05.01 |
12.01 |
19.011 |
Numery i tematy ćwiczeń:
Seria I
1. Identyfikacja obiektów sterowania
a) Identyfikacja obiektów sterowania metodą charakterystyk czasowych
b) Identyfikacja obiektów sterowania metodą charakterystyk częstotliwościowych
2. Sprzętowa i programowa synteza układów sterowania logicznego
a) Synteza kombinacyjnych układów sterowania logicznego
b) Synteza sekwencyjnych układów sterowania logicznego
3. Analiza ciągłego, liniowego układu automatycznej regulacji
Seriali
4. Synteza układów automatycznej regulacji z regulatorem PID
5. Regulacja impulsowa
7. Sterownie logiczne na bazie sterownika PLC oraz modelu windy
8. Praktyczna realizacja sterowania na bazie modułu logicznym LOGO!
9. Sterowanie logiczne na bazie sterownika PLC oraz modelu przejścia dla pieszych
Wyszukiwarka
Podobne podstrony:
Plan zajęć laboratoryjnych z przedmiotu AUTOMATYKA I REGULACJA AUTOMATYCZNA w semestrze zimowym
elektro 2 Plan zajęć laboratoryjnych z przedmiotu "Elektrotechnika i Elektronika" dla
PLAN ZAJĘĆ LABORATORYJNYCH - rok akademicki 2015/2016, semestr letni Wydział: OiO, kierunek:
PLAN ZAJĘĆ DYDAKTYCZNYCH - rok akademicki 2015/16 - semestr zimowy Aktualizacja pliku:
Plan zajęć - II rok Prawa- studia niestacjonarne semestr zimowy 2015/2016
Plan zajęć - II rok Prawa- studia niestacjonarne semestr zimowy 2015/2016 Praw
sipr lab Harmonogram zajęć laboratoryjnych z przedmiotu: Sterowanie i programowanie robotówdla kieru
więcej podobnych podstron