arcz 127
$.2 Przekładnia hydrokinetyczna
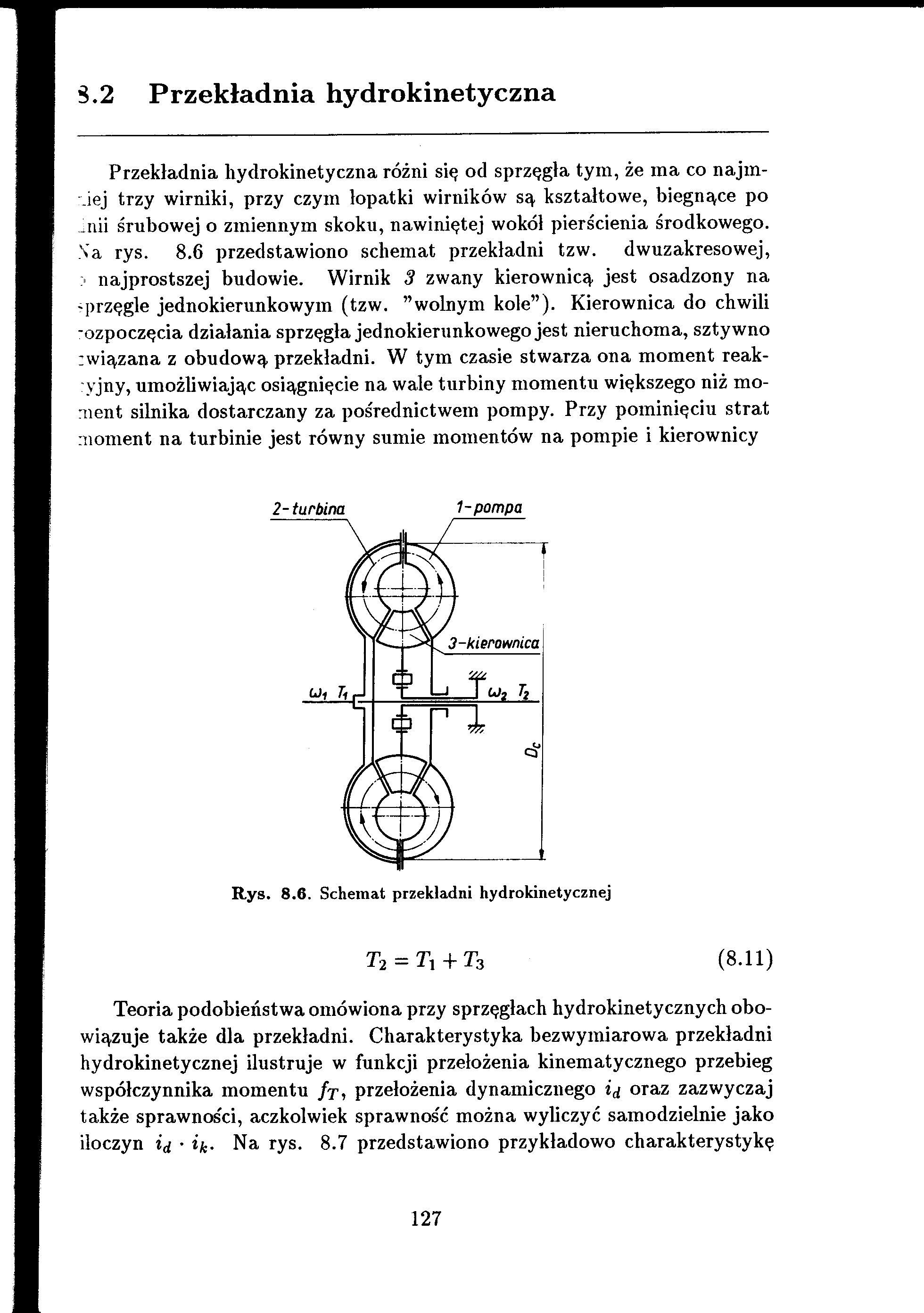
Przekładnia hydrokinetyczna różni się od sprzęgła tym, że ma co najm-Jej trzy wirniki, przy czym łopatki wirników są kształtowe, biegnące po nii śrubowej o zmiennym skoku, nawiniętej wokół pierścienia środkowego. Na rys. 8.6 przedstawiono schemat przekładni tzw. dwuzakresowej, najprostszej budowie. Wirnik 3 zwany kierownicą jest osadzony na -przęgle jednokierunkowym (tzw. ”wolnym kołe”). Kierownica do chwiłi -ozpoczęcia działania sprzęgła jednokierunkowego jest nieruchoma, sztywno rwiązana z obudową przekładni. W tym czasie stwarza ona moment reak-yjny, umożliwiając osiągnięcie na wale turbiny momentu większego niż moment silnika dostarczany za pośrednictwem pompy. Przy pominięciu strat moment na turbinie jest równy sumie momentów na pompie i kierownicy
2-tu rbina 1-pompa
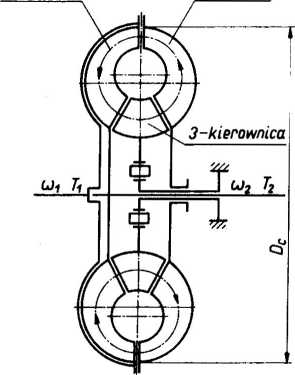
Rys. 8.6. Schemat przekładni hydrokinetycznej
t2 = tx + t3 (8.ii)
Teoria podobieństwa omówiona przy sprzęgłach hydrokinetycznych obowiązuje także dla przekładni. Charakterystyka bezwymiarowa przekładni hydrokinetycznej ilustruje w funkcji przełożenia kinematycznego przebieg współczynnika momentu fr, przełożenia dynamicznego id oraz zazwyczaj także sprawności, aczkolwiek sprawność można wyliczyć samodzielnie jako iloczyn id ■ ik■ Na rys. 8.7 przedstawiono przykładowo charakterystykę
127
Wyszukiwarka
Podobne podstrony:
Zabójstwa nie należy mylić z nieumyślnym spowodowaniem śmierci, które różni się od zabójstwa ty
Slajd171 WIERCENIE RDZENIOWE - rdzeniówki podwójne Rdzeniówki podwójne różnią się od pojedynczych ty
Rozdział IX. Czekoladowo-truskawkowe że on się dla nas poświęca i że ma co innego do roboty niż chod
farma zwierzeta Twoje imię:_ Pokoloruj obrazek,, któiy różni sie od innych.
File0055 Znajdź w każdym rzędzie jeden element, który różni się od pozostałych.
Image102 Bramka z otwartym obwodem kolektora Bramka z otwartym obwodem kolektora różni się od typowy
Zdjęcia 0123 Zadanie: Czym koncepcja testu przesiewowego rożni się od koncepcji badania diagnostyczn
img290 - cnomąto angielskie różni się od pozostałych posiadaniem metalowych
img015 15 15 Rye. 2. Średnie ciepło właściwe różni się od ciśnienia otoczenia Wartość ciepła
więcej podobnych podstron