deadbeat
Sterowanie Dyskretne
dr inż. Agata Nawrocka
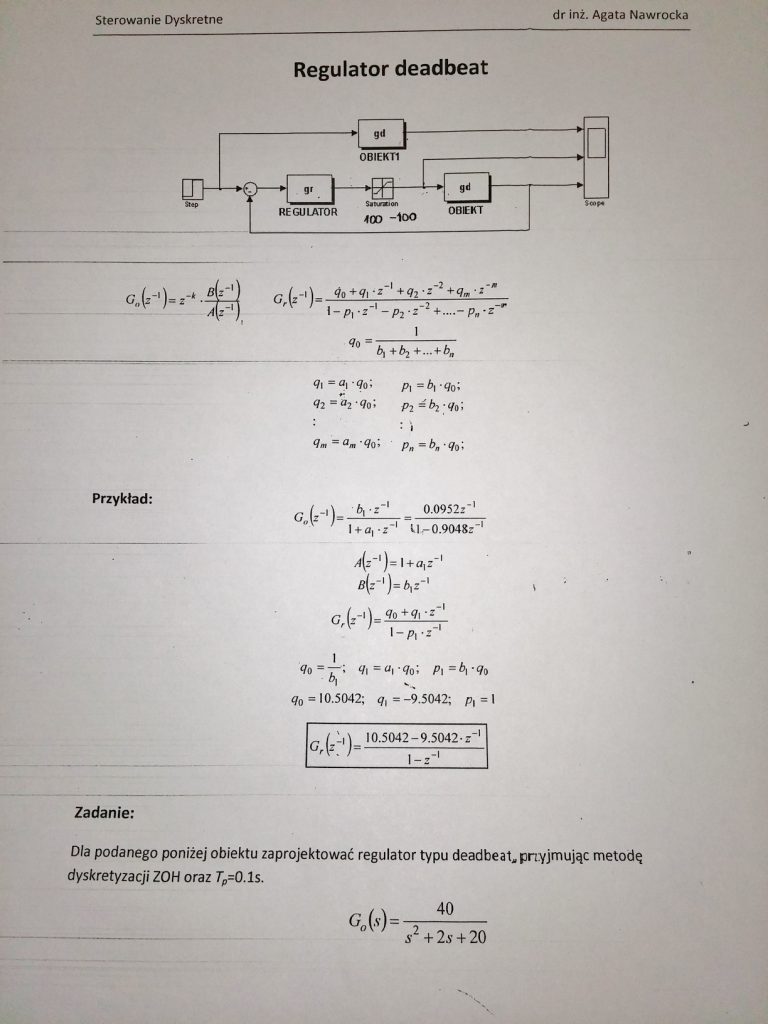
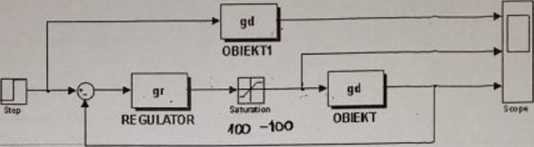
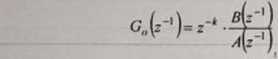
Regulator deadbeat
\-px-z -p2-
<ł0+<jrz~' + q2-z~2+qm-z'
+ p„-z
bl+b2+—+b„
ql**arq0; P]=brq0: (i2=a2‘qo'» p2 = b2-qQ\
~ am qo\ p„=b„ q0\
Przykład:
I + a, • z'
0.0952* U-0.90482 1
a(z~')= I + a,z_l
<ło = —; </i = "i'<7oi Pi=V<7o b'
q0 = 10.5042; qt = -9.5042; /?, = I
G 10.5042-9.5042-r~'
Zadanie:
Dla podanego poniżej obiektu zaprojektować regulator typu deadbeat* pnyjmując metodę dyskretyzacji ZOH oraz Tp=0. ls.
Wyszukiwarka
Podobne podstrony:
KATEDRA AWIDMIKI STEROWAŃ IA Dr inż. Michał Chłędowski PODSTAWY AUTOMATYKI I ROBOTYKI-
PRELEGENCII ŚLĄSKIEJ KONFERENCJI DIETETYKI KLINICZNEJ DR INZ. AGATA GAŻDZIŃSKA DR HAB. N. MED. PAWEŁ
Agata Glinkowska dr inż. arch. - obiekty użyteczności publicznej (z uwzględnieniem
RKING PRASOWA OPRACOWANIE dr inż. arch. Anetta Kępczyńska-Walczak mgr inż. arch. Agata
skanuj0043 (2) : DR INŻ. ANDRZEJ PUSZER KATEDRA ENERGETYKI PROCESOWEJ STEROWANIE
uZachodniopomorski Uniwersytet Technologiczny Dr inż. PIOTR PAWELKONAPĘD I STEROWANIE PNEUMATYCZNE
Prof. dr hab inż. Roman JANICZEK Dr inż. Marian MIKRUT50 LAT INSTYTUTUELEKTROENERGETYKI I STEROWANIA
Komputerowe układy sterowaniaKomputerowe układy sterowania Dr inź. Janusz Baran
Automatyka i Robotyka - Semestr VIIi-1. Programowalne sterowniki logiczne Wykładowca: dr inż. Tomasz
SYSTEMY STEROWANIA ELEKTRONICZNEGO W POJAZDACH SAMOCHODOWYCH Prowadzący: dr inż. Piotr Bogusz EDA, E
Bazy Danych AN+EN+IS Wykład 1Wprowadzenie dr inz. Włodzimierz Dąbrowski Instytut Sterowania i
P1H/P5. Sterowanie numeryczne w maszynach technologicznych - 5h WE, 15h L, ECTS = 4 Prowadzący: dr i
więcej podobnych podstron