DSCN9931
|
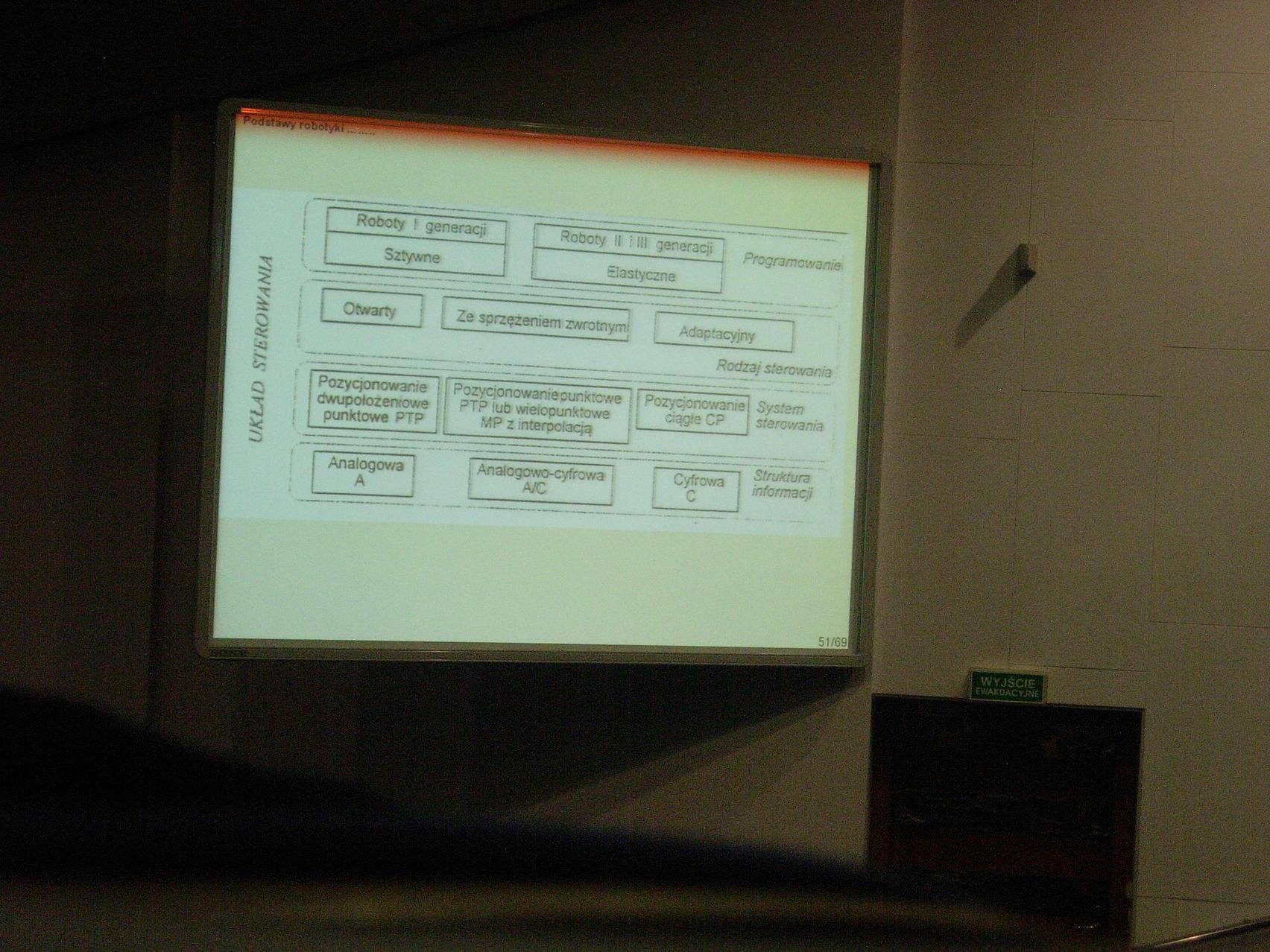
— Sztywne | |
|
' ■ - - |
Otwarty
R°boty ! generacji j t Roboty II ! III generacji l Pfogr3mowani
Elastyczne
Adaptacyjny
Ze sprzężeniem zwrotnym!
Rodzaj sterowania
|
I Pozycjonowanie Jj |
Pozycjonowaniepunkrcwe |
0 |
System |
|
1 dwupółożenrawe i j punktowe PTP [ |
PTPlub wwlopunktowe |
ciągłe C? |
sterowania |
|
MP z interpolacją | |||
|
1 Analogowa j A |
j Analogowo-cyfrowa i A/C |
; Cyfrowa i [ C 1 |
Struktura informacji |
51/691
WYJŚCIE I
EWAKUACYJNE [fl
Wyszukiwarka
Podobne podstrony:
Roboty II generacji Roboty II generacji są wyposażone w różnego rodzaju czujniki umożliwiające
scandjvutmp10a�01 1 436 436 r-fcdł-1 . —r ✓ EL_1 IM W- a _ J ■ II r w i w K-1-
xyz2 i p •r^AjAr :Ji jrjTj , riip * 1 [q; .i-iii II PWI vfr ’ ■1
IMG 38 (4) r~~*n---- formy KFN których—siały ------r ii--ymkurozbio rów Polski. O pełnej demokratyza
lb lia ^ ^i ^ ^ ! E r» ę> ^C3 ER •u II 1 "2 R
Układ wtryskowy SIEMENS I , II i III ej generacji Układ wtryskowy SIEMENS I, II i III-ciej generacji
mechanika (28) C/ćt/c? ! eofacnapt^- o r~4r^J -:— % 1 HH .i: H V A vj_ 1 II •_
cw5 (3) KMBiM WILiS PGFp GEOMETRIA WYKREŚLNA I / / fTrrr/i r~7 t~* tt t-1 ii m r v
71573 SNC01887 UmU M ilM *.- *"**> rrr* ----- *» r— i_ ; W——*, paia pi ii ETK* HZ!. U
01 generation p 2011 I II III IV V VI VII VIII IX X XI XIISEE DATĘ OF PREMIERE ON THE LABELTOCT 26-8
WYKR 1 PCX Bez obciążenia i filtracji. u
t promotor06D52[1] »r. lUf 1VSQ liń , ►>.«*< i ii "csr 3 a 3 a 3
piwnica PIWWICA t"T 8 8 8 8 —f h -I ł- -I (-SIL ~r JL 10 -ar ii
więcej podobnych podstron