kolo gr2
Imię i nazwisko..................................................................................... Nr albumu
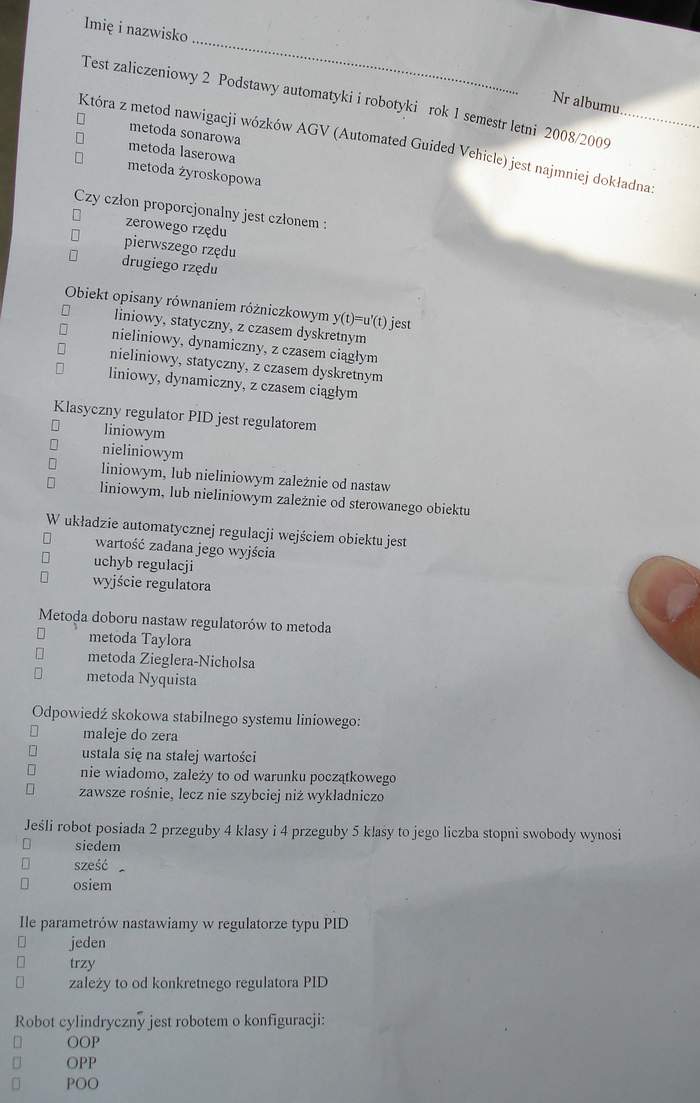
Test zaliczeniowy 2 Podstawy automatyki i robotyki rok I semestr letni 2008/2009
metoda sonarowa metoda laserowa metoda żyroskopowa
Która z metod nawigacji wózków AGV (Automated Guided VeScle)jcst najmniej dokladJ O metoda sonarowa
n
Czy człon proporcjonalny jest członem : zerowego rzędu pierwszego rzędu Q drugiego rzędu
Obiekt opisany równaniem różniczkowym y(t)=u’(t)jest liniowy, statyczny, z czasem dyskretnym nieliniowy, dynamiczny, z czasem ciągłym nieliniowy', statyczny, z czasem dyskretnym liniowy, dynamiczny, z czasem ciągłym
Klasyczny regulator PID jest regulatorem 0 liniowym
nieliniowym
liniowym, lub nieliniowym zależnie od nastaw liniowym, lub nieliniowym zależnie od sterowanego obiektu
W układzie automatycznej regulacji wejściem obiektu jest wartość zadana jego wyjścia Q uchyb regulacji
wyjście regulatora
Metoda doboru nastaw regulatorów to metoda metoda Taylora metoda Zieglera-Nicholsa metoda Nyquista
Odpow iedź skokowa stabilnego systemu liniowego: maleje do zera ustala się na stałej wartości nie wiadomo, zależy to od warunku początkowego zawsze rośnie, lecz nie szybciej niż wykładniczo
Jeśli robot posiada 2 przeguby 4 klasy i 4 siedem
0 sześć .
0 osiem
Ile parametrów nastawiamy w regulatorze typu PID
przeguby 5 klasy to jego liczba stopni
ii swobody wynosi
jeden
trzy
zależy to od konkretnego regulatora PID
Robot cylindryczny jest
robolem
o konfiguracji:
Wyszukiwarka
Podobne podstrony:
stata 2 kolo A Grupa, Imię i nazwisko, Zadanie 1 W wyniku przeprowadzonego badania w pewnym przedsię
kolo mop1 (imię, nazwisko, grupa)KOLOKWIUM grupa AZadanie 1 Przedsiębiorstwo X chce zrealizować inwe
36874 Zadrozny kolo 3 Grupa.Imię i nazwisko: Tabela: działy IDDzialu Nazwa Kierownik N(5)/Nr dział
fizyka kolo 2 GrA. Wydz. Imię Nazwisko; Nr indeksu: 1. Ciało o masie 1 kg znajduje
2 koło z mechaniki jpeg KOLOKWIUM - DYNAMIKA - MBIM (10.06.20lir.) godz. 7-9 - GR. A IMIĘ I NAZWISKO
Uklady cyfrowe kolo I2003? GRUPA A D Q CLK Q Rys. Dwójka licząca Roz.wici~.anie Imię i naz
test cwiczenia gr2 8smsilr limowy 2006/2007 Studia dzienne imię I nazwisko kierunek PW, Wydiłil Tra
UC1 kolo I2002 Układy cyfrowo (kolokwium dn. 20.01.2002) Imię i nazwisko............................
kolo jpeg iNGOWli 2009-06-0_ZARZĄDZANIE MARKETKolokw mm Imię i nazwisko ukiże
tarcza strzelecka2 łowiecki www.ldwiecki.pl Instruktor Podpis Imię i nazwisko Koło
Parkitna koło 01 2013 grupa2 (5) Imię i nazwisko Zad. 2 Dowód Fa, Pz, KW Pz, protokół przekazania
Ewidencja składek Koło TPDEwidencja składek L.p. Imię i nazwisko Składka za I-III Składka za
więcej podobnych podstron