kolokwium gr1
Imię i An/wi A»'
Nr iAmkm
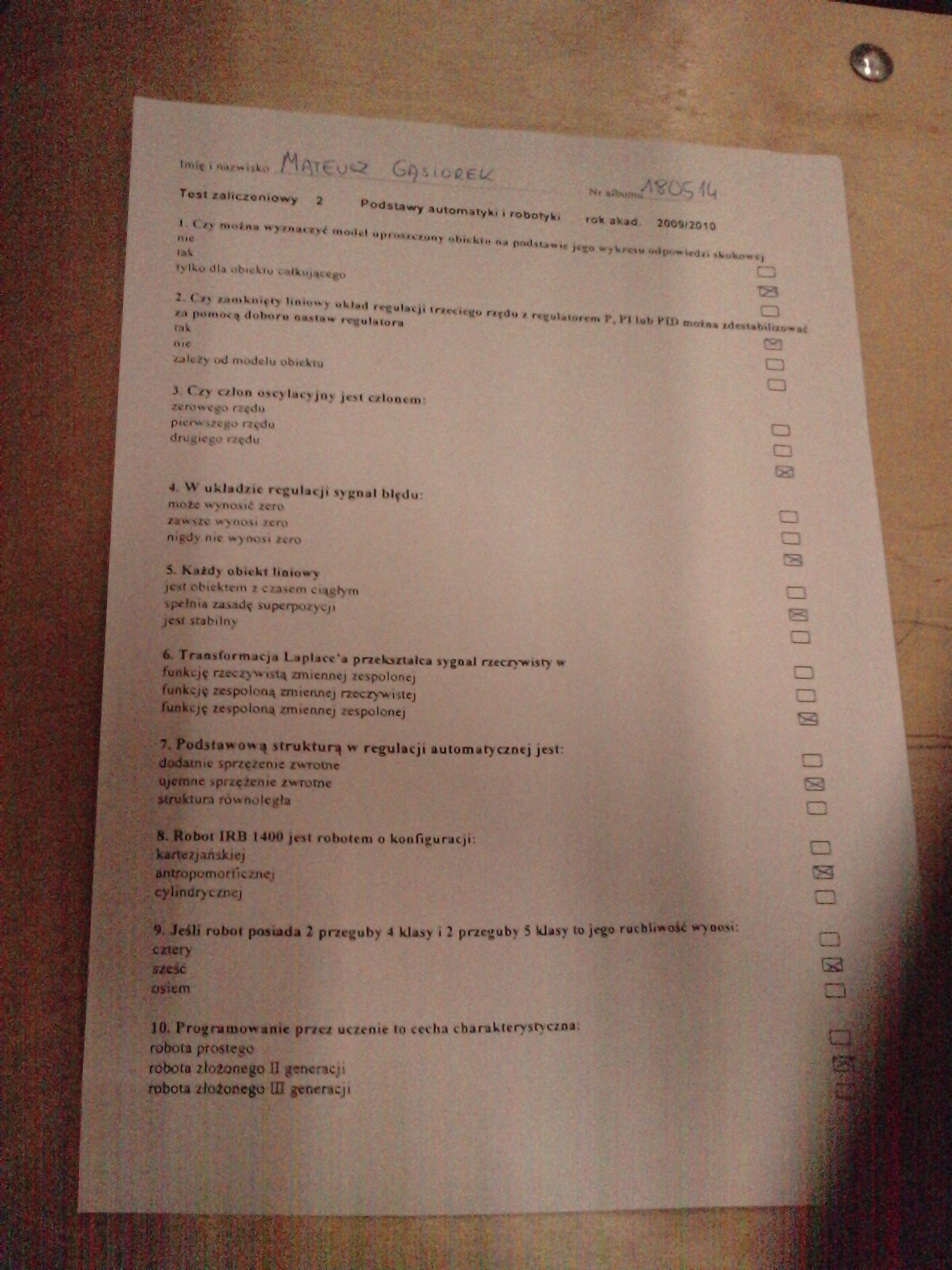
Tost ttlfczonfowy 2 PodsUwy automatyki i robotyk, rok Akad 2001/2010 1.0) m«»t«a wy*a#cT>ć madal upn>*'Ciuoy ohtoklw na podti jwM jC«0 »; krów mc
lak i\ IKu dla %»bickiu i ftłkującego
L—J
2. Cr) zamknięty linio w y ukUH rf|nl*^)i inrtni;v rifdu / ri{uUii>f«<n f, PI lvb K(P bMm iifnuhilui

□
o
□ □a cioia neon □□a □ 0□ □ ®□ nan
r
/.i pomocą doboru na«ia«« regulatora
rek mc
zalety od modelu obiektu
3 f/> c/lon ułC)li»)]n) jol c/loocm zerowego rządu
pierw ./ego rzędu drugiego rzędu
4 W układne regulacji sygnał błędu: mofce wynosić zero
zewrze wynosi zero nigdy nie wynosi tero
5. Kald) obiekt Holowy jest obiektem z czasem ciągłym spełnia zasadę superpozyęji jest stabilny
i Transformacja Łapiące'a przekształca sygoai rzeczywisty w funkcję rzeczywistą zmiennej zespolonej funkcję zespoloną zmiennej rzeczywistej funkcję zespoloną zmiennej zespolonej
H Podstawową strukturą w regulacji autom a tycznej jest: dodatmc sprzężenie zwrotne Ujemne >przęZenie zwrotne struktura równoległa
8. Robol IRB 1400 jest robotem o konfiguracji:
kartazjańskjej
antropomor l k znej
cylindry czncj
0. Jeśli robol poaiada 2 przeguby 4 klasy i 2 przeguby 5 klasy to jego ruchliwość wyoosi
cztery
izcśc
Osiem 10. Próg ramowanie przez uczenie to cecha charakterystyczna:
robota prostego
robota zlotonego 11 generacji
robota złojonego [0 generacji
Wyszukiwarka
Podobne podstrony:
10649114d5439752240959C39216476928493078 o Wychossanic Fizyczne - studia stacjonarne - rok akad. 200
10649114d5439752240959C39216476928493078 o Wychowanie Fizyczne - stadia stacjonarne - rok akad. 2009
anatomia5 Kolokwium I dla Studentów Oddziału Ratownictwa Medycznego - Licencjat Zaoczny Rok akad. 20
elk kolos3 10 180! 2010ELK - Podstawy elektroniki - kolokwium 2 imię ł nazwisko: ..V.....£?.*£ nr in
PRI k1 06 v1 1 PRI - kolokwium 1 Zestaw 1 Imię i nazwisko: nr albumuS/3■i- i/10 grupa Pytania: 1.
77262 spom kol4 -z Kolokwium SPOM Imię, nazwisko, grupa: Suma punktów: Nr. Treść pytania o*^> l
relac - □ X Tabelal : Tabela ■ p Id Osoby Imię Nazwisko Miejscowość Ulica Nr
TEST A Kolokwium SPOM Imię, nazwisko, grupa; Suma punktów:. Nr. Treść pytania Odp. X 31 Rozkaz
TEST C Kolokwium SPOM Imię, nazwisko, grupa: .r Nr. -4? Ul n 40 ...............................
Brycz kolokwium ćwiczenia Imię i nazwisko nr grupy nr indeksuZad. 1. Koszy utrzymania sklepu
(30) Wynik przedstawiamy w postaci; An = V-cl- 4-5 H
10517447f5318400254561F0635928241884838 n Kolokwium 1 Nazwisko i imię: Nr grupy i
Matematyka wokół nas. Klasa 3 ■ PRAWPZI AN nr 2_Grupa A Imię i nazwisko___Klasa ___Ocena Nr
Matematyka wokół nas. Klasa 3 ■ PRAWPZI AN nr 2_Grupa A Imię i nazwisko___Klasa ___Ocena Nr
2011 11 17 Kolokwium Blok Imię i nazwisko ..Podstawy Systemów informacyjnych - kolokwium I ■ nr inde
więcej podobnych podstron