mech2 43
li I
f i
S^ł
= ~aud - aw • cos 60° = -9 - 355 * 0,5 = -186 cm/s^,
az = —cos 30° = -355 ' = -308 cm/s1,
a = 1/a^ + e1 + a1 = 395 cm/s1.
Wyniki rozwiązania zestawiono w tabeli 20.
Tabela 20
|
UJ u e-2 |
Prędkość, cm/s |
"u s-1 | ||
|
vu |
?w |
V | ||
|
-0,93 |
9,3 |
65,2 |
65,9 |
-10,2 |
Przyspieszenie, cm/s*
|
*ud |
*uo |
WD |
aC |
3^ |
*7 |
az |
a | |
|
9 |
102 |
0 |
-355 |
61 |
165 |
-186 |
-308 |
395 |
B. Złożony ruch ciała sztywnego (składanie obrotów wokół osi równoległych i przeginających się) 3.3. Określenie prędkości kątowych członów przekładni planetarnej
z kołami walcowymi
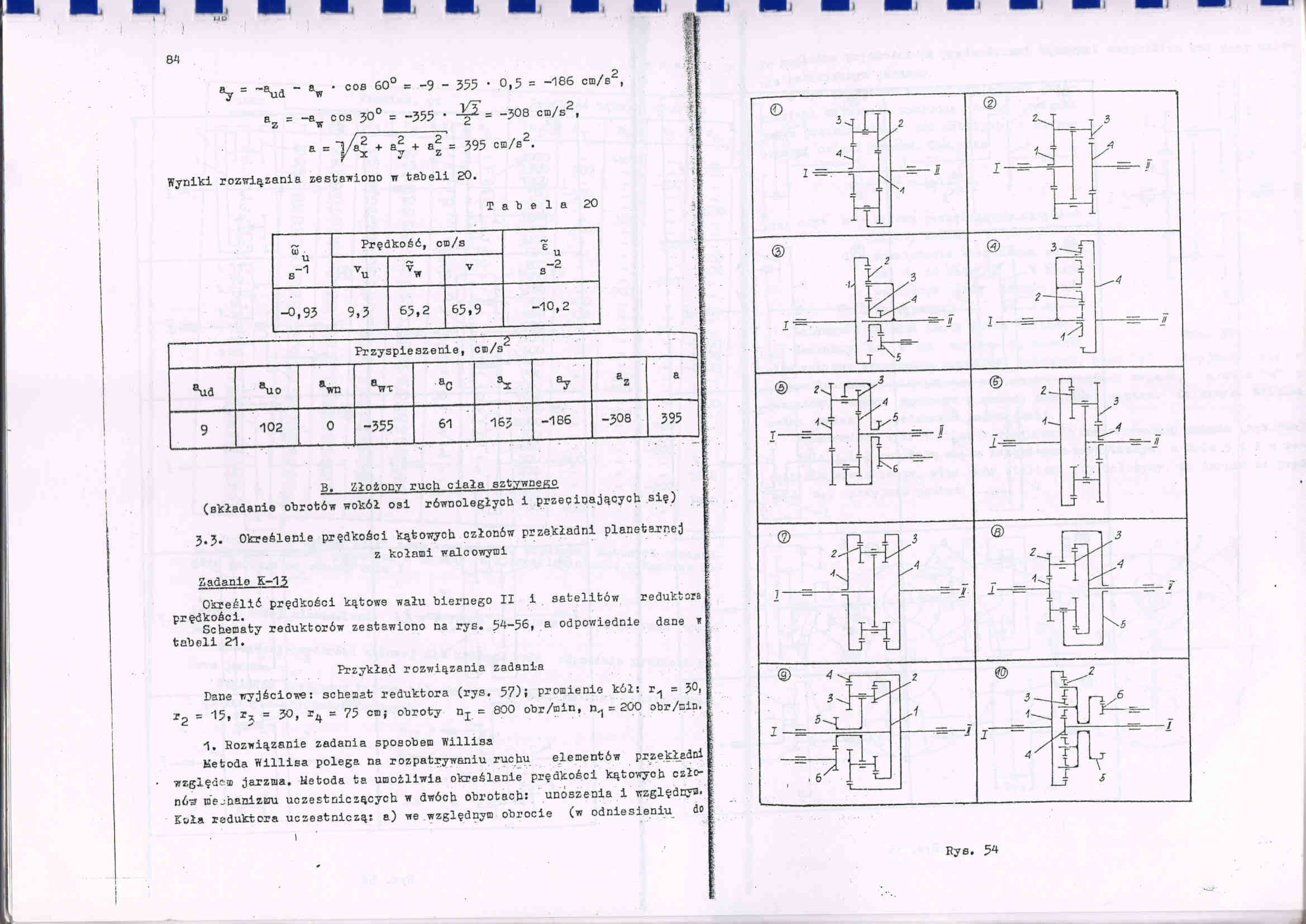
Zadanie K-13
Określić prędkości kątowe wału biernego II i satelitów reduktora prędkości.
Schematy reduktorów zestawiono na rys. 54-56, a odpowiednie daDe * tabeli 21.
Przykład rozwiązania zadania
Dane wyjściowe: schemat reduktora (rys. 57)i promienie kół: r^ = }0, *2 - 151 1* = 30, r^ = 73 cm,• obroty nj = 800 obr/min, n^ = 200 obr/cin.
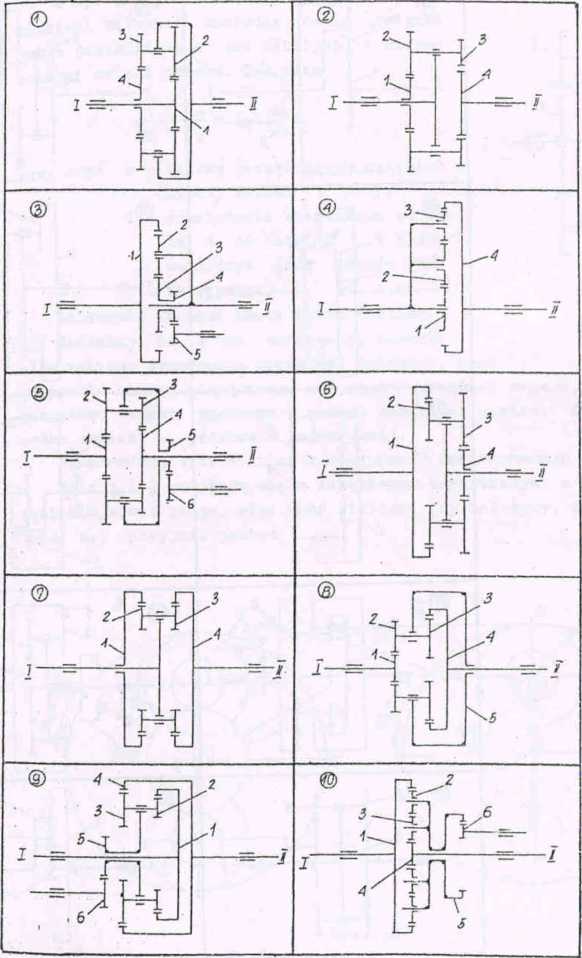
Rys. 54
Ketoda WilliBa polega na rozpatrywaniu ruchu elementów przekładni względrm jarztua. Metoda ta umożliwia określanie prędkości kątowych członów mej paniztou uczestniczących w dwóch obrotach: unoszenia i względnya. Soła reduktora uczestniczą? a) we względnym obrocie (w odniesieniu do
Rozwiązanie zadania sposobem Willisa
Wyszukiwarka
Podobne podstrony:
mech2 73 u ■m stąd 0 Vr Nc = G cos 60° + Dq =; wg oos 60° + -~ = Y2 2 =i n (g cos
mech2 73 u ■m stąd 0 Vr Nc = G cos 60° + Dq =; wg oos 60° + -~ = Y2 2 =i n (g cos
e64fff14f5d50c69e0e46c9eebc308a3 d372ujg r Vr CA •łi i if, i, fSL r.fpnĘĘ ii W . ... 11 Q
42 Toman Pajor /W Btonomk Ltns. Polish report 43 II. If one assumes that the cmplo
p ■ fii i 3
sprawozdanie TC grzejnik zaliczone przez pania K 1 9.hD«A«M r i 61 I I fi -li f ł f * o r- r r f *
13 (43) £i £iIr. L/r * _S_rr" yX /***. ky r^cJj^CA**jr*ns L+st w /od u C:v)4
?! fs li 1 N if l i w ijl -jf jf ?s f I: p rf F 0
1 1 1 1 I 1 Li:if ^ ■ i SS . m i a •, ęW* ł— *ł*. ^ ■ "V ■ ■ & "T- - •
AP 01 AP 02 AP 05 AP 15 AP 23 AP 27 AP 30 AP 32 AP 33 AP 41 AP 43 AP 44 AP 52 AP 60 AP
V;! ^*
,i to S^rfĘT^O , fl pv n ił ,ł r ^ t li. ‘if^b^ł !/’ , ** > LiiSjh n i
7 • Uaiu u J&LsacL*Łi. .if* i/j«A iijJiA iUumt. 1. Która z wymicntonjtK purr
więcej podobnych podstron