mechanika116
* 2 2 . ' - —- bu>, sin ió.t
l fi
- — w2&(l - sino>,r) + —doł^sinwj/
fi fi
Obliczenia odpowiadające chwili /, = 3it/(2ojj):
. 3it . . 3* n
sin o, r, = sin— = -1, cosn>, f, * cos-— = 0
s(t) ~ b (-l) = -b —► punkt materialny jest w' położeniu A
vw(f,) - bu)xO * 0
«*(*!> = -bu]-(-1) = bu]
r(tx) = ^[1 - <-!)] = 2b
vM(r.) = —^*>(1 -{-l))ex = -~ubet V5
^('i) " -(-l>] + -p^«J(-1)lół =
y5 1/5 V5 I
= — + —(-2u2b - u]b)e
fi 7 fi
Zadanie rozwiązano przy założeniu, że położ.enie tarczy jest jednakowi w chwili bieżącej t i w chwili
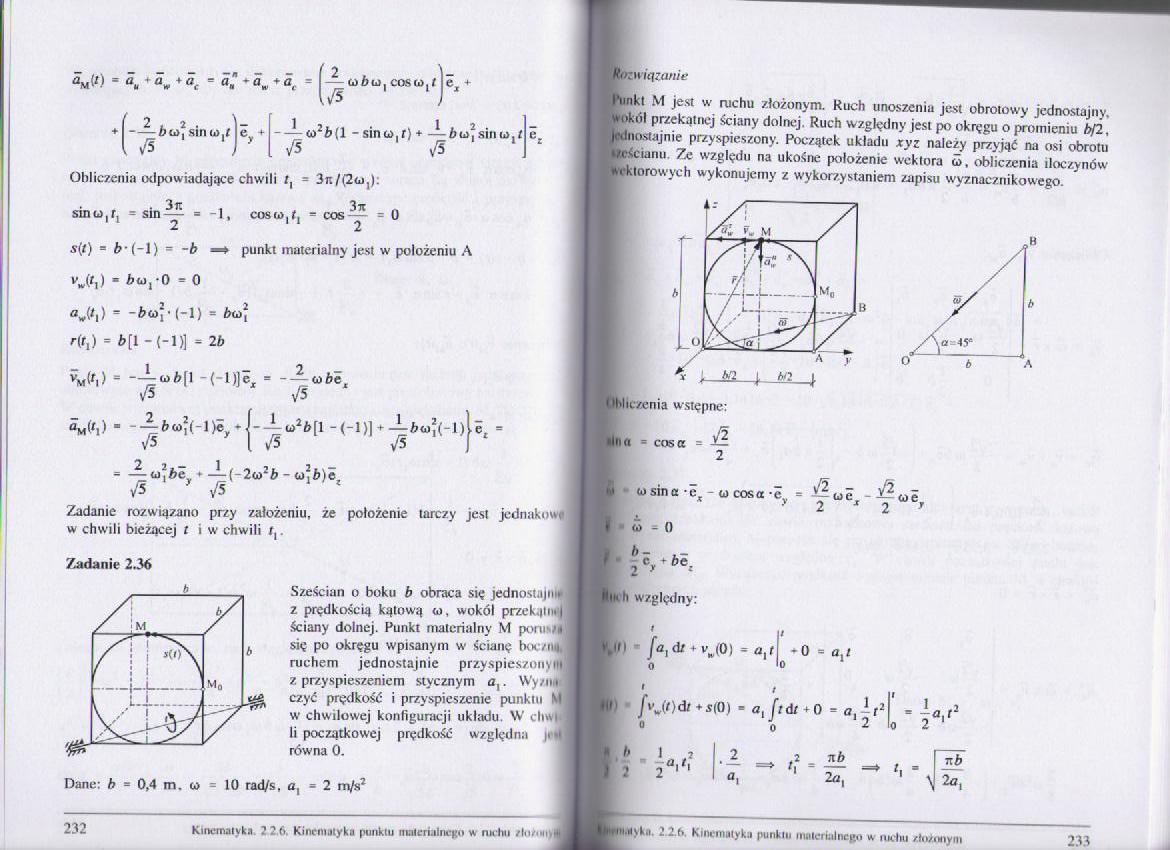
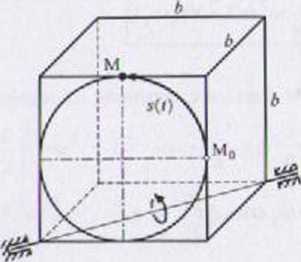
Zadanie 2.36
Sześcian o boku b obraca się jednostajni# I z prędkością kątową cj, wokół przek.|ln»'| ściany dolnej. Punkt materialny M porwali I się po okręgu wpisanym w ścianę boc/iui, ruchem jednostajnie przyspieszonym
z przyspieszeniem stycznym a,. Wy/iw cz.yć prędkość i przyspieszenie punktu M w chwilowej konfiguracji układu. W cl»v\|i li początkowej prędkość względna )• 4 równa 0.
Dane: b = 0,4 m. w = 10 rad/s, a, = 2 mfs7
232
Rozwiązanie
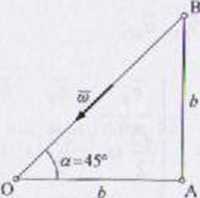
i Punkt M jest w ruchu złożonym. Ruch unoszeniu jest obrotowy jednostajny, ■•okół przekątnej ściany dolnej. Ruch względny jest po okręgu o promieniu bf2, •ostajnie przyspieszony. Początek układu xyz należy przyjąć na osi obrotu Sianu. Ze względu na ukośne położenie wektora u, obliczenia iloczynów sektorowych wykonujemy z wykorzystaniem zapisu wyznacznikowego.
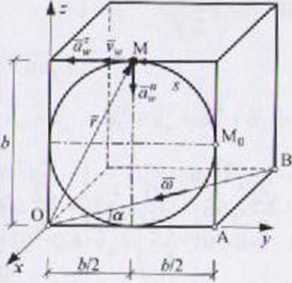
>1 iczenia wstępne:
In <i cos a = — 2
- fi - fi -
u sin c ■ c — ca cos ot * e = ~uc, — ue
x y 2 2 7
[atdf + vJ0) = axt
* 0 ■
• t
W) • fvjt)d/+s(0) - ax ftdt + 0 = ax -r2
b 1 2
*- _ --a.i. 2 2 1 1
w
3
\
nb
Kinematyka ? 2 6. Kinematyka punktu maicn.ilnepn ^ m«lm /t« */• 2 2 6 Kinematyka punki u muleruilncgn * mchu /in/miyni
233
Wyszukiwarka
Podobne podstrony:
skanuj0025 (66) „ o ,.4 i . i/OU.^UN-sWil i Am “ 4 SSI), j+&v , 0VOcVTA> <‘Ą- i kitce-A
UNIWKRSYTFT WRÓCI AWSKI Wydział Nauk Biologicznych hj C& P^ STACJONARNE “,aw
Ł?>as>ats S&O 0CG>M10b\l 9 CM 3 0 DN80 oś +16.62 ««ł>?l*l<rilR2*» “-AW
Dsc00431 (12) QSY* Uołl Sg “”_ .y On/r>M>v AvQD a»*<?ł -/5^Sn -/£ am nmxł Y = 3<^?nr»/r^
SS851498 7RSTT ^7^55^c57~ ✓f7>° *j/ftfcuOt4tAO A~°* /a©c=-~y-“«« >«•« A*.ttó*o
u*up*ifhUr ) r^7 S~Aw ^?>^» £*£ ;.-a^śisv -? 9‘r^ns
mechanika77 przy czym: — rys. 2.23a «l = «A+*<> «2 * «A “ ^ <a* > <0 <2.5*1) - ry
ipm c4 «p<& mrom te ^«0Ka*»s» aw r m&& O^mmm mf&m m&tem te
23 luty 07 (45) Przyspieszenie dowolnego punktu K wyraża się wzorem (2.4) aK=aU+aW = a01 + aK01 +
Strona0289 289 > V: = V [ 1 ] +V [ 2 ] ; V := -mgx(0 Ąk{S„ + x(/))2 ~kSl > V:=simplify(V) ; 1
J. German: PODSTAWY MECHANIKI KOMPOZYTÓW WŁÓKNISTYCH ♦ Metoda kontaktowa Jest to
*am i ? ?r «ps?T$ 4 ♦$$&>.
skanuj0021 2 i. -i¥m • iSf-iS.!. SaKi feS*¥ ,*: - vF^. EMOCJE h:a! •. {U :-ir.i ;c& mmsm >w»
więcej podobnych podstron