23 luty 07 (45)
Przyspieszenie dowolnego punktu K wyraża się wzorem
(2.4)
aK=aU+aW = a01 + aK01 + aK01
gdzie:
a01
przyspieszenie początku układu ruchomego wynikające z jego
translacji (przyspieszenie unoszenia), aQ1 =
d2r
dt2'
aK01< aK01
odpowiednio przyspieszenie normalne i styczne punktu K względem punktu O, wynikające z rotacji układu ruchomego (przyspieszenie względne).
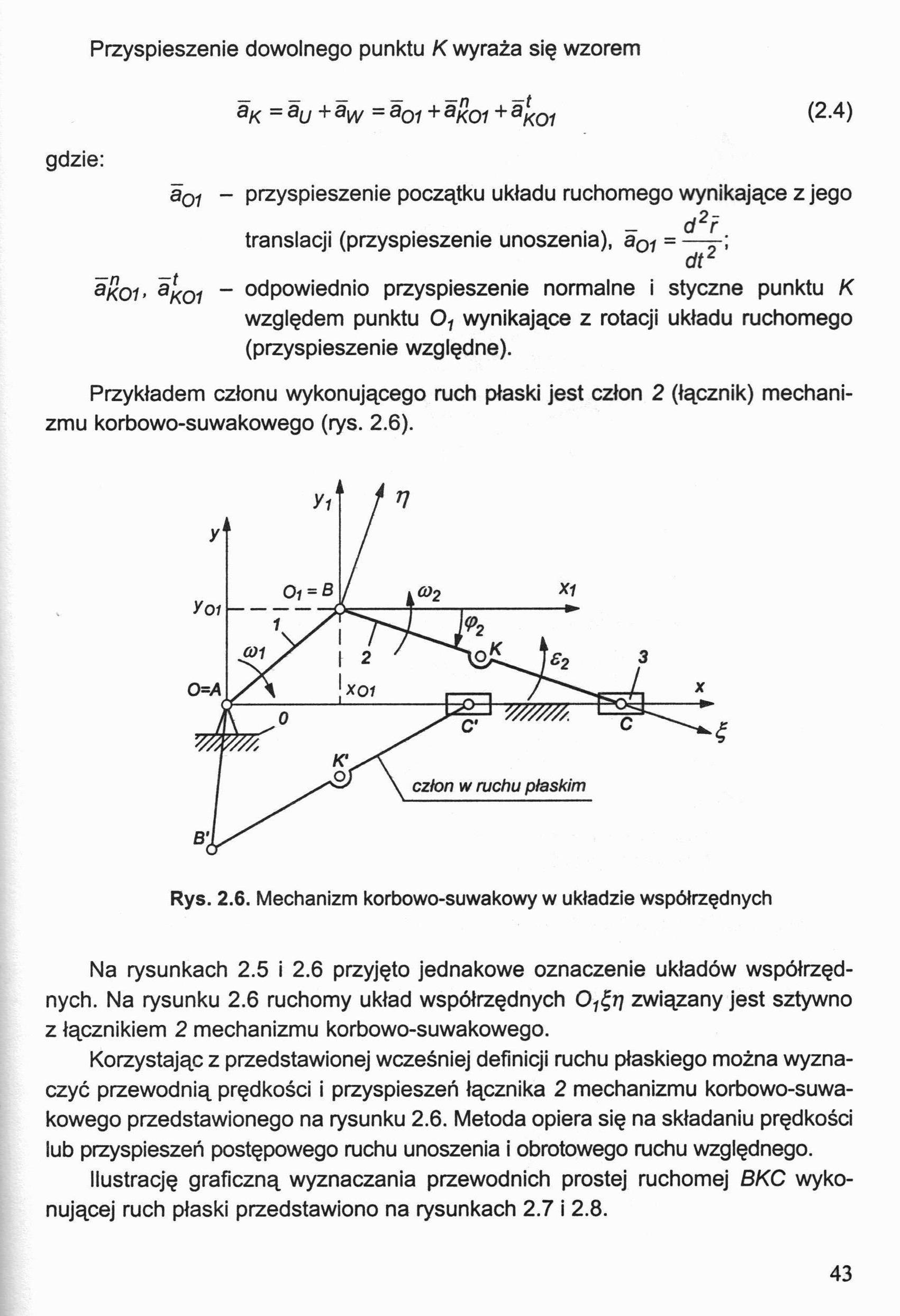
Przykładem członu wykonującego ruch płaski jest człon 2 (łącznik) mechanizmu korbowo-suwakowego (rys. 2.6).
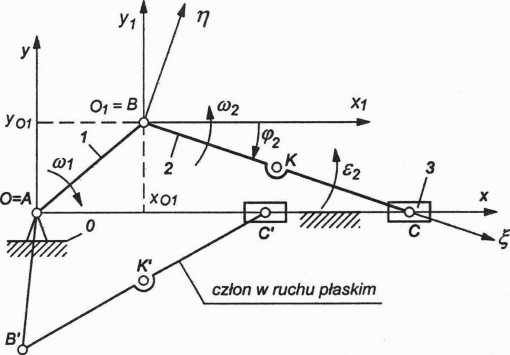
Rys. 2.6. Mechanizm korbowo-suwakowy w układzie współrzędnych
Na rysunkach 2.5 i 2.6 przyjęto jednakowe oznaczenie układów współrzędnych. Na rysunku 2.6 ruchomy układ współrzędnych O^t) związany jest sztywno z łącznikiem 2 mechanizmu korbowo-suwakowego.
Korzystając z przedstawionej wcześniej definicji ruchu płaskiego można wyznaczyć przewodnią prędkości i przyspieszeń łącznika 2 mechanizmu korbowo-suwakowego przedstawionego na rysunku 2.6. Metoda opiera się na składaniu prędkości lub przyspieszeń postępowego ruchu unoszenia i obrotowego ruchu względnego.
Ilustrację graficzną wyznaczania przewodnich prostej ruchomej BKC wykonującej ruch płaski przedstawiono na rysunkach 2.7 i 2.8.
43
Wyszukiwarka
Podobne podstrony:
23 luty 07 (64) Przyspieszenie punktu K można również znaleźć, obliczając w pierwszym 6 • BK zrównać
23 luty 07 (43) Przyspieszenie kątowe: (2.2c) (2.2d) (2.2e) (2-2f) e(t) = (0,0,e(t)), e(t) = ^ = ^-
23 luty 07 (52) Przyspieszenie Coriolisa acor =0, gdy: cou =0, lub vw =0 lub vwHwu. Ostatni przypade
23 luty 07 (70) Przyspieszenie względne (aDB) można wyznaczyć również na podstawie znajomości długoś
23 luty 07 (77) Przyrost przemieszczenia kątowego AVk =Vk+1~¥k (2.21) Prędkość kątowa członu ,
23 luty 07 (66) Łącząc biegun planu przyspieszeń na z punktem przecięcia b2 otrzymamy wartość przysp
23 luty 07 (73) Następnie zapisujemy równanie przyspieszenia punktu B2, który znajduje się na członi
23 luty 07 (104) Rys. 2.45. Przekładnia obiegowa jednorzędowa o jednym stopniu swobody: a) schemat k
23 luty 07 (10) Ciało sztywne to układ punktów materialnych, w którym wzajemne odległości dwóch dowo
23 luty 07 (133) Rozwiązanie w układzie płaskim dowolnego równania wektorowego, czyli narysowanie pl
23 luty 07 (20) 1.1.6. Ruchliwość mechanizmu Liczba stopni swobody względem nieruchomej podstawy, kt
23 luty 07 (41) Do opisu postępowego ruchu bryły wystarczy wybrać jeden dowolny punkt należący do br
23 luty 07 (42) W ruchu postępowym przewodnia prędkości i przewodnia przyspieszeń prostej ruchomej,
23 luty 07 (44) W ruchu obrotowym przewodnia prędkości i przewodnia przyspieszeń prostej ruchomej są
23 luty 07 (47) Przewodnia przyspieszeń obrotowego ruchu względnego Składanie przyspieszenia unoszen
23 luty 07 (48) Prędkość vB i przyspieszenie aB wynikają z postępowego ruchu unoszenia, prędkość vCB
23 luty 07 (53) Rys. 2.13. Składowe przyspieszeń suwaka 2 poruszającego się po prostoliniowej prowad
23 luty 07 (54) graficzne wektorów prędkości i przyspieszeń stanowiących odpowiedniki wektorów rzecz
23 luty 07 (55) Oznacza to, że długości rysunkowe wektorów prędkości liniowej oraz przyspieszenia li
więcej podobnych podstron