23 luty 07 (44)
W ruchu obrotowym przewodnia prędkości i przewodnia przyspieszeń prostej ruchomej są nachylone do tej prostej odpowiednio pod kątem a i y, tak jak to pokazano na rysunku 2.4.
Ruch płaski członu
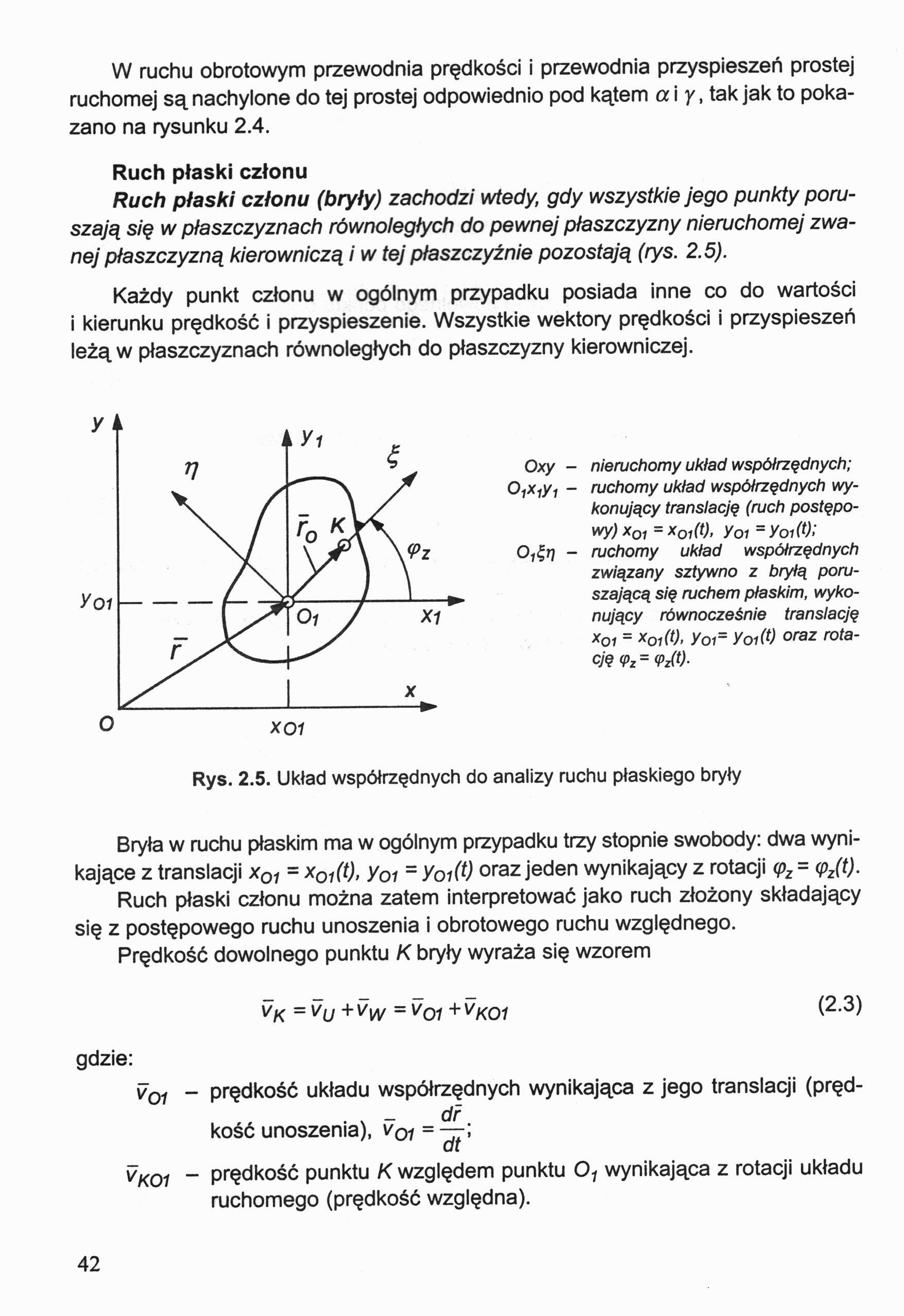
Ruch płaski członu (bryły) zachodzi wtedy, gdy wszystkie jego punkty poruszają się w płaszczyznach równoległych do pewnej płaszczyzny nieruchomej zwanej płaszczyzną kierowniczą i w tej płaszczyźnie pozostają (rys. 2.5).
Każdy punkt członu w ogólnym przypadku posiada inne co do wartości i kierunku prędkość i przyspieszenie. Wszystkie wektory prędkości i przyspieszeń leżą w płaszczyznach równoległych do płaszczyzny kierowniczej.
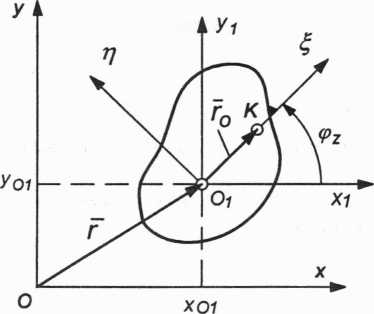
Oxy - nieruchomy układ współrzędnych;
0,x,y, - ruchomy układ współrzędnych wykonujący translację (ruch postępowy) *oi = xoik)' yoi =yoi(V;
0,0(1) - ruchomy układ współrzędnych związany sztywno z bryłą poruszającą się ruchem płaskim, wykonujący równocześnie translację x01 = xoi(0. yoi= yoi(h oraz rotację <Pz = Vz(t).
Rys. 2.5. Układ współrzędnych do analizy ruchu płaskiego bryły
Bryła w ruchu płaskim ma w ogólnym przypadku trzy stopnie swobody: dwa wynikające z translacji x01 = x01(t), yQ1 = y01(t) oraz jeden wynikający z rotacji q>z = ęz(t).
Ruch płaski członu można zatem interpretować jako ruch złożony składający się z postępowego ruchu unoszenia i obrotowego ruchu względnego.
Prędkość dowolnego punktu K bryły wyraża się wzorem
(2.3)
VK =vu +vw = V01 +VK01
gdzie:
vQ1 - prędkość układu współrzędnych wynikająca z jego translacji (prędkość unoszenia), vQ1 = —;
dt
vKOi - prędkość punktu K względem punktu 01 wynikająca z rotacji układu ruchomego (prędkość względna).
42
Wyszukiwarka
Podobne podstrony:
23 luty 07 (42) W ruchu postępowym przewodnia prędkości i przewodnia przyspieszeń prostej ruchomej,
23 luty 07 (57) Następnie piszemy równanie prędkości punktu C, traktując ruch łącznika 2 jako ruch z
23 luty 07 (65) Następnie zapisujemy równanie prędkości punktu S2, który znajduje się na członie 2 s
23 luty 07 (47) Przewodnia przyspieszeń obrotowego ruchu względnego Składanie przyspieszenia unoszen
23 luty 07 (101) Rys. 2.44. Schematy przekładni obiegowej z zaznaczonymi prędkościami kątowymi: a) b
23 luty 07 (121) Siły bezwładności przyłożone do członu w ruchu obrotowym Przypadek ogólny przedstaw
23 luty 07 (30) Rys. 1.22. Zastępowanie pary kinematycznej utworzonej przez krzywkę obrotową i popyc
23 luty 07 (46) VCB Składanie prędkości unoszenia i prędkości względnej Rys. 2.7. Wyznaczanie przewo
23 luty 07 (48) Prędkość vB i przyspieszenie aB wynikają z postępowego ruchu unoszenia, prędkość vCB
23 luty 07 (51) Prędkość bezwzględna vb w ruchu złożonym vb=vu+vw (2.7) gdzie: vu
23 luty 07 (81) prędkości i przyspieszeń kątowych członu przyjęto przeciwnie do ruchu wskazówek zega
23 luty 07 (106) Znak (-) we wzorze (P2.102) oznacza, że zwrot prędkości kątowej satelity 2 jest prz
23 luty 07 (111) Zróżnicowanie prędkości kół umożliwia przekładnia stożkowa złożona z kół 3, 4 i 5,
23 luty 07 (114) Pierwsze zadanie dynamiki. Dla zadanych kinematycznych równań ruchu mechanizmu nale
23 luty 07 (122) Rys. 3.5. Siły bezwładności przyłożone do członu w ruchu płaskim Siły bezwładności
23 luty 07 (124) Para kinematyczna klasy 5 obrotowa - przegub walcowy Jeżeli pominiemy tarcie, to ki
23 luty 07 (40) W mechanizmie płaskim człon może wykonywać jedynie ruch postępowy, obrotowy lub płas
23 luty 07 (41) Do opisu postępowego ruchu bryły wystarczy wybrać jeden dowolny punkt należący do br
23 luty 07 (49) 1 B człon w ruchu płaskim W celu wyznaczenia chwilowego środka obrotu członu 2 rysuj
więcej podobnych podstron