23 luty 07 (122)
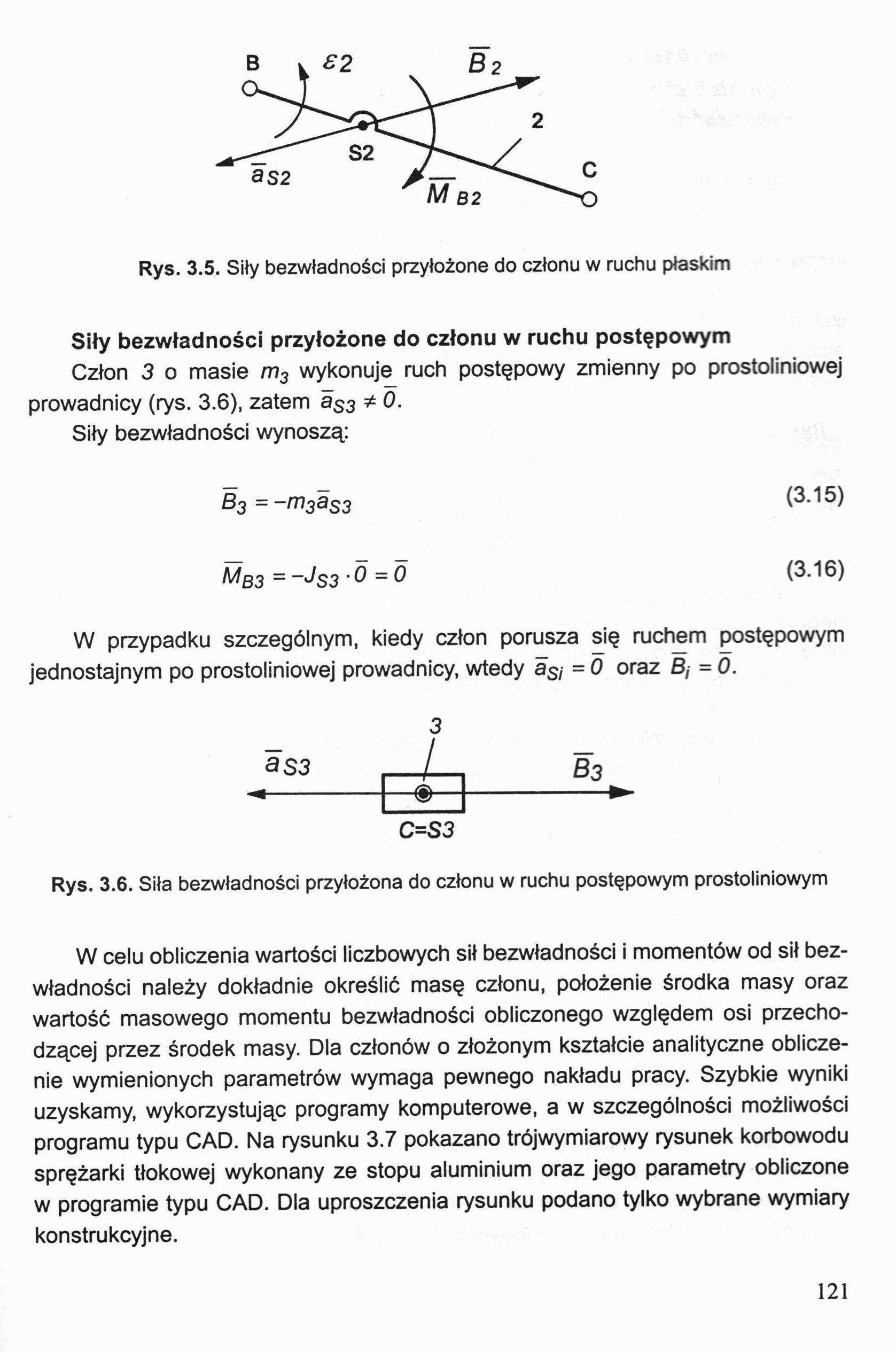
Rys. 3.5. Siły bezwładności przyłożone do członu w ruchu płaskim
Siły bezwładności przyłożone do członu w ruchu postępowym
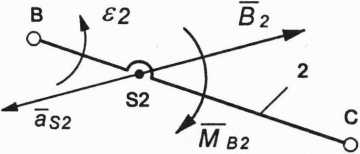
Człon 3 o masie m3 wykonuje ruch postępowy zmienny po prostoliniowej prowadnicy (rys. 3.6), zatem ag3 * 0.
|
Siły bezwładności wynoszą: | |
|
63 = -m3as3 |
(3.15) |
|
Mb3 = -Js3 •0=0 |
(3.16) |
W przypadku szczególnym, kiedy człon porusza się ruchem postępowym jednostajnym po prostoliniowej prowadnicy, wtedy a$/ = Ó oraz S(- = 0.
|
/śs | ||
|
W |
C=S3
Rys. 3.6. Siła bezwładności przyłożona do członu w ruchu postępowym prostoliniowym
W celu obliczenia wartości liczbowych sił bezwładności i momentów od sił bezwładności należy dokładnie określić masę członu, położenie środka masy oraz wartość masowego momentu bezwładności obliczonego względem osi przechodzącej przez środek masy. Dla członów o złożonym kształcie analityczne obliczenie wymienionych parametrów wymaga pewnego nakładu pracy. Szybkie wyniki uzyskamy, wykorzystując programy komputerowe, a w szczególności możliwości programu typu CAD. Na rysunku 3.7 pokazano trójwymiarowy rysunek korbowodu sprężarki tłokowej wykonany ze stopu aluminium oraz jego parametry obliczone w programie typu CAD. Dla uproszczenia rysunku podano tylko wybrane wymiary konstrukcyjne.
121
Wyszukiwarka
Podobne podstrony:
23 luty 07 (116) a) b) P 3 Rys. 3.1. Siły zewnętrzne działające na mechanizm korbowo-suwakowy Objaśn
23 luty 07 (123) Rys. 3.7. Przykład wyznaczania masy, położenia środka masy i momentu bezwładności c
23 luty 07 (101) Rys. 2.44. Schematy przekładni obiegowej z zaznaczonymi prędkościami kątowymi: a) b
23 luty 07 (104) Rys. 2.45. Przekładnia obiegowa jednorzędowa o jednym stopniu swobody: a) schemat k
23 luty 07 (112) Rys. 2.51. Schemat konstrukcyjny przekładni kształtowo-tocznej, e- mimośród - Rys.
23 luty 07 (132) Rys. 3.16. Człony czworoboku przegubowego oswobodzone od więzów Rozwiązujemy układ
23 luty 07 (136) Wyznaczamy siły ciężkości: G? = m^g, G2 = m2g, G3 = m3g. Na mechanizm działa dodatk
23 luty 07 (142) Rys. 3.23. Analiza sił działających na grupę strukturalną (2, 3): a) układ sił zewn
23 luty 07 (17) Rys. 1.7. Para kinematyczna klasy 4 (wyższa): a) para krzywka - popychacz; b) para z
23 luty 07 (18) Rys. 1.9. Łańcuch kinematyczny zamknięty mechanizmu dźwigniowego kruszarki W celu an
23 luty 07 (30) Rys. 1.22. Zastępowanie pary kinematycznej utworzonej przez krzywkę obrotową i popyc
23 luty 07 (53) Rys. 2.13. Składowe przyspieszeń suwaka 2 poruszającego się po prostoliniowej prowad
23 luty 07 (59) Rys. 2.16. Plan przyspieszeń punktów mechanizmu korbowo-suwakowego Rozwiązujemy wykr
23 luty 07 (48) Prędkość vB i przyspieszenie aB wynikają z postępowego ruchu unoszenia, prędkość vCB
23 luty 07 (121) Siły bezwładności przyłożone do członu w ruchu obrotowym Przypadek ogólny przedstaw
23 luty 07 (149) Uwalniając suwak od więzów (rys. 3.31) naieżałobyzatem przyłożyć normalne siły reak
23 luty 07 (118) W mechanizmach i maszynach wolnobieżnych, gdzie siły bezwładności są małe w porówna
23 luty 07 (103) Dla przekładni o dwóch stopniach swobody (przekładnia różnicowa, rys. 2.44a), w któ
23 luty 07 (115) 2) Ze względu na moc siły uogólnionej, siły możemy podzielić na s
więcej podobnych podstron