23 luty 07 (132)
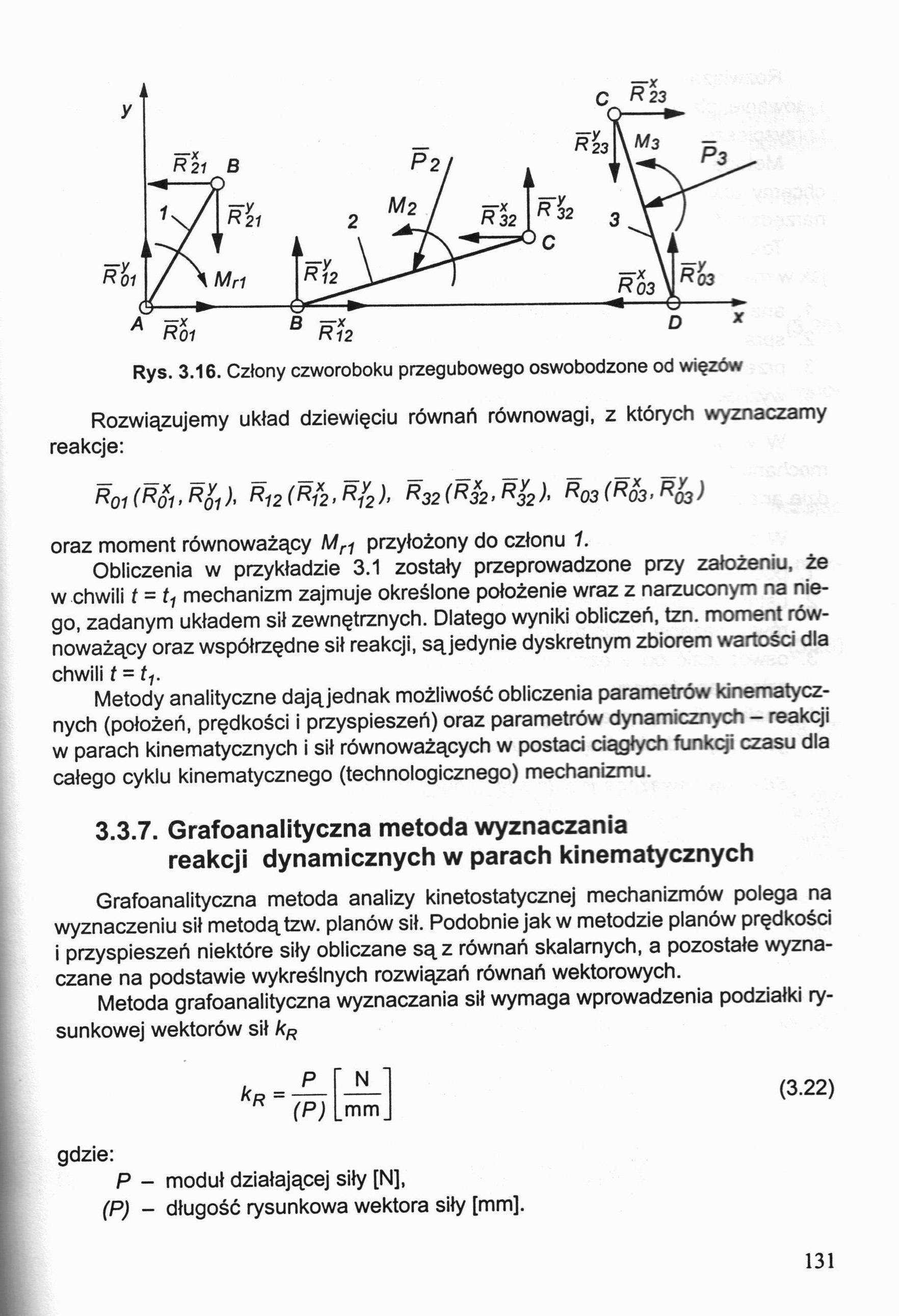
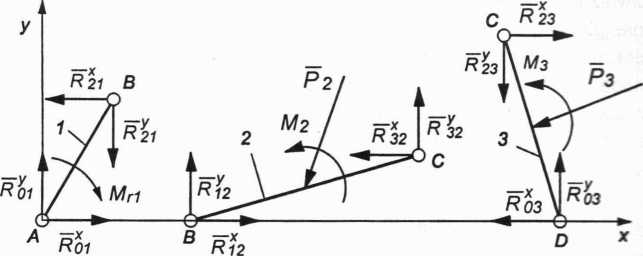
Rys. 3.16. Człony czworoboku przegubowego oswobodzone od więzów
Rozwiązujemy układ dziewięciu równań równowagi, z których wyznaczamy reakcje:
Roi(Roi'*&h Rl2(R*2'Riy2)’ *32(R32,R$2)’ Ro3(Ro3.R&,)
oraz moment równoważący Mr1 przyłożony do członu 1.
Obliczenia w przykładzie 3.1 zostały przeprowadzone przy założeniu, że w chwili t = t-i mechanizm zajmuje określone położenie wraz z narzuconym na niego, zadanym układem sił zewnętrznych. Dlatego wyniki obliczeń, tzn. moment równoważący oraz współrzędne sił reakcji, sąjedynie dyskretnym zbiorem wartości dla chwili t = t-,.
Metody analityczne dająjednak możliwość obliczenia parametrów kinematycznych (położeń, prędkości i przyspieszeń) oraz parametrów dynamicznych - reakcji w parach kinematycznych i sił równoważących w postaci ciągłych funkcji czasu dla całego cyklu kinematycznego (technologicznego) mechanizmu.
3.3.7. Grafoanalityczna metoda wyznaczania
reakcji dynamicznych w parach kinematycznych
Grafoanalityczna metoda analizy kinetostatycznej mechanizmów polega na wyznaczeniu sił metodą tzw. planów sił. Podobnie jak w metodzie planów prędkości i przyspieszeń niektóre siły obliczane są z równań skalarnych, a pozostałe wyznaczane na podstawie wykreślnych rozwiązań równań wektorowych.
Metoda grafoanalityczna wyznaczania sił wymaga wprowadzenia podziałki rysunkowej wektorów sił kR
kR
P__N_
(P) mm
(3.22)
gdzie:
P - moduł działającej siły [N],
(P) - długość rysunkowa wektora siły [mm].
131
Wyszukiwarka
Podobne podstrony:
23 luty 07 (59) Rys. 2.16. Plan przyspieszeń punktów mechanizmu korbowo-suwakowego Rozwiązujemy wykr
23 luty 07 (101) Rys. 2.44. Schematy przekładni obiegowej z zaznaczonymi prędkościami kątowymi: a) b
23 luty 07 (104) Rys. 2.45. Przekładnia obiegowa jednorzędowa o jednym stopniu swobody: a) schemat k
23 luty 07 (112) Rys. 2.51. Schemat konstrukcyjny przekładni kształtowo-tocznej, e- mimośród - Rys.
23 luty 07 (116) a) b) P 3 Rys. 3.1. Siły zewnętrzne działające na mechanizm korbowo-suwakowy Objaśn
23 luty 07 (122) Rys. 3.5. Siły bezwładności przyłożone do członu w ruchu płaskim Siły bezwładności
23 luty 07 (123) Rys. 3.7. Przykład wyznaczania masy, położenia środka masy i momentu bezwładności c
23 luty 07 (142) Rys. 3.23. Analiza sił działających na grupę strukturalną (2, 3): a) układ sił zewn
23 luty 07 (17) Rys. 1.7. Para kinematyczna klasy 4 (wyższa): a) para krzywka - popychacz; b) para z
23 luty 07 (18) Rys. 1.9. Łańcuch kinematyczny zamknięty mechanizmu dźwigniowego kruszarki W celu an
23 luty 07 (30) Rys. 1.22. Zastępowanie pary kinematycznej utworzonej przez krzywkę obrotową i popyc
23 luty 07 (53) Rys. 2.13. Składowe przyspieszeń suwaka 2 poruszającego się po prostoliniowej prowad
23 luty 07 (124) Para kinematyczna klasy 5 obrotowa - przegub walcowy Jeżeli pominiemy tarcie, to ki
23 luty 07 (14) Odbieranie bryle stopni swobody polega na narzuceniu więzów w określonych kierunkach
24 luty 07 Wobec symetrii mechanizmu względem osi poziomej uwalniamy od więzów tylko grupę struktura
23 luty 07 (103) Dla przekładni o dwóch stopniach swobody (przekładnia różnicowa, rys. 2.44a), w któ
23 luty 07 (21) Przykład 1.1 n = 3p1 = 0,p2 = 0, p3= 1, p4=1, ps=2 Rys. 1.11. Przestrzenny czworobok
23 luty 07 (127) rysunki 3.11 b i c - dwa rozłączone człony z przyłożonymi siłami reakcji przesunięt
23 luty 07 (137) Zapisujemy wektorowe równania równowagi sił działających na człony 2 i 3: dla człon
więcej podobnych podstron