23 luty 07 (53)

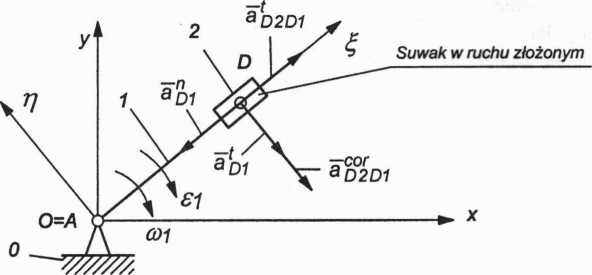
Rys. 2.13. Składowe przyspieszeń suwaka 2 poruszającego się po prostoliniowej prowadnicy 1 Oznaczenia jak na rysunku 2.12
Przyspieszenie bezwzględne środka suwaka zapiszemy za pomocą równania wektorowego
aD2 = aD1 + aD2D1 + aD2D1 (2-10)
gdzie: aD1 = a£7 + alD1, stąd: aD2 = + afD1 + ałD2D1 + aD2Dl.
II AD 1 AD II AD 1 AD
ap-j = co? • AD - przyspieszenie normalne unoszenia punktu Dt wynikające z ruchu obrotowego prowadnicy, a{D1 - Ef ■ AD - przyspieszenie styczne unoszenia punktu D1 wynikające z ruchu obrotowego prowadnicy, aD2Di ~ Przyspieszenie względne styczne suwaka 2 względem prowadnicy 1,
aD2Di = 2<w7 x vD2Di ~ przyspieszenie Coriolisa punktu D2 względem punktu Dv
W rozważanym przypadku przyspieszenie względne normalne nie zostało uwzględnione
aD2Di = Hm — = 0, ponieważ dla prowadnicy prostoliniowej p? = °°,
pf-*~ p7
2.2.2. Podziałki rysunkowe
W kinematyce wykreślnej konieczne jest wprowadzenie podziałek umożliwiających rysowanie schematów kinematycznych mechanizmów oraz dodawanie
51
Wyszukiwarka
Podobne podstrony:
23 luty 07 (59) Rys. 2.16. Plan przyspieszeń punktów mechanizmu korbowo-suwakowego Rozwiązujemy wykr
23 luty 07 (101) Rys. 2.44. Schematy przekładni obiegowej z zaznaczonymi prędkościami kątowymi: a) b
23 luty 07 (104) Rys. 2.45. Przekładnia obiegowa jednorzędowa o jednym stopniu swobody: a) schemat k
23 luty 07 (112) Rys. 2.51. Schemat konstrukcyjny przekładni kształtowo-tocznej, e- mimośród - Rys.
23 luty 07 (116) a) b) P 3 Rys. 3.1. Siły zewnętrzne działające na mechanizm korbowo-suwakowy Objaśn
23 luty 07 (122) Rys. 3.5. Siły bezwładności przyłożone do członu w ruchu płaskim Siły bezwładności
23 luty 07 (123) Rys. 3.7. Przykład wyznaczania masy, położenia środka masy i momentu bezwładności c
23 luty 07 (132) Rys. 3.16. Człony czworoboku przegubowego oswobodzone od więzów Rozwiązujemy układ
23 luty 07 (142) Rys. 3.23. Analiza sił działających na grupę strukturalną (2, 3): a) układ sił zewn
23 luty 07 (17) Rys. 1.7. Para kinematyczna klasy 4 (wyższa): a) para krzywka - popychacz; b) para z
23 luty 07 (18) Rys. 1.9. Łańcuch kinematyczny zamknięty mechanizmu dźwigniowego kruszarki W celu an
23 luty 07 (30) Rys. 1.22. Zastępowanie pary kinematycznej utworzonej przez krzywkę obrotową i popyc
23 luty 07 (54) graficzne wektorów prędkości i przyspieszeń stanowiących odpowiedniki wektorów rzecz
23 luty 07 (63) Na przecięciu kierunków przyspieszeń (afKB) i (afKC) otrzymamy punkt k. Biegun na łą
23 luty 07 (66) Łącząc biegun planu przyspieszeń na z punktem przecięcia b2 otrzymamy wartość przysp
23 luty 07 (73) Następnie zapisujemy równanie przyspieszenia punktu B2, który znajduje się na członi
23 luty 07 (128) Wariant D Wariant ten przedstawia przypadek szczególny pary kinematycznej suwak-pro
Image25 (26) 48 1.14 a. Przyspieszenie punktu poruszającego się po okręgu wyraża się za pomocą współ
Image25 (26) 48 1.14 a. Przyspieszenie punktu poruszającego się po okręgu wyraża się za pomocą współ
więcej podobnych podstron