23 luty 07 (128)
Wariant D
Wariant ten przedstawia przypadek szczególny pary kinematycznej suwak-prowadnica. Drugą parą kinematyczną suwaka jest w tym przypadku przegub, który leży na osi prowadnicy, a układ sił działających na suwak jest układem środkowym. Należy w tym miejscu przypomnieć, że każdy człon mechanizmu tworzy co najmniej dwie pary kinematyczne z innymi członami.
Znany jest punkt przyłożenia reakcji w środku przegubu i jej kierunek prostopadły do prowadnicy (w przypadku gdy tarcie nie występuje).
Nieznana jest wartość reakcji - jedna niewiadoma.
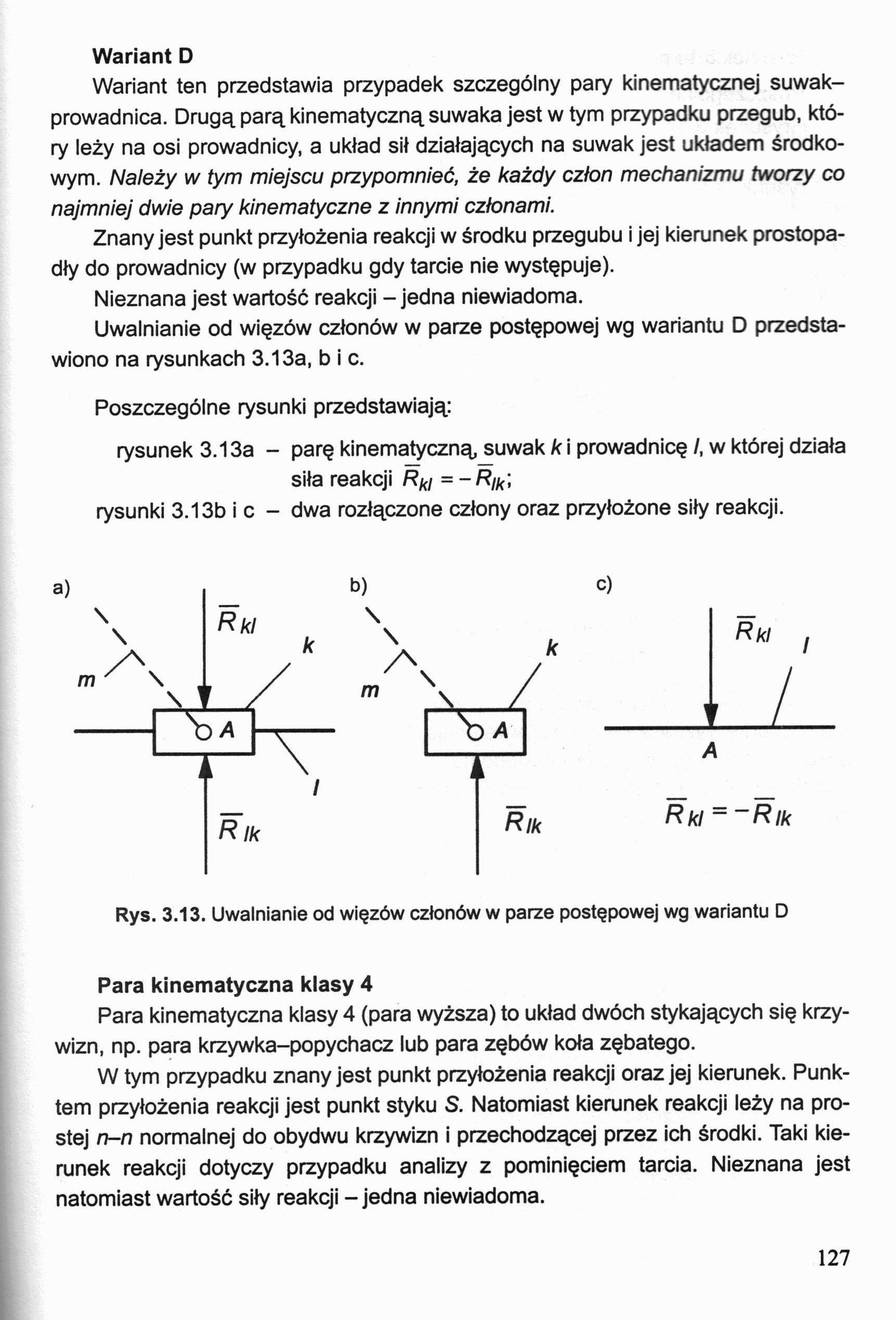
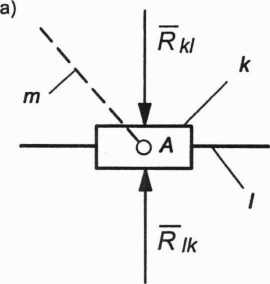
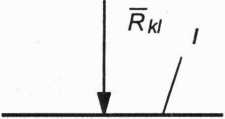
Uwalnianie od więzów członów w parze postępowej wg wariantu D przedstawiono na rysunkach 3.13a, b i c.
Poszczególne rysunki przedstawiają:
rysunek 3.13a - parę kinematyczną, suwak k i prowadnicę /, w której działa siła reakcji R^ = - R^',
rysunki 3.13b i c - dwa rozłączone człony oraz przyłożone siły reakcji.
b)
\
\
A
m
\
\
U
C)
A
Rys. 3.13. Uwalnianie od więzów członów w parze postępowej wg wariantu D
Para kinematyczna klasy 4
Para kinematyczna klasy 4 (para wyższa) to układ dwóch stykających się krzywizn, np. para krzywka-popychacz lub para zębów koła zębatego.
W tym przypadku znany jest punkt przyłożenia reakcji oraz jej kierunek. Punktem przyłożenia reakcji jest punkt styku S. Natomiast kierunek reakcji leży na prostej n-n normalnej do obydwu krzywizn i przechodzącej przez ich środki. Taki kierunek reakcji dotyczy przypadku analizy z pominięciem tarcia. Nieznana jest natomiast wartość siły reakcji - jedna niewiadoma.
127
Wyszukiwarka
Podobne podstrony:
23 luty 07 (147) Na rysunku 3.28a przedstawiono uwolnioną od więzów grupę strukturalną (2, 3) z przy
23 luty 07 (53) Rys. 2.13. Składowe przyspieszeń suwaka 2 poruszającego się po prostoliniowej prowad
23 luty 07 (125) Para kinematyczna klasa 5 postępowa - suwak i prowadnica Możliwe są trzy warianty u
23 luty 07 (24) Oznacza to, że człon 3 (krążek) w wariancie A jest kinematycznie zbędny. Tworzy on j
23 luty 07 (121) Siły bezwładności przyłożone do członu w ruchu obrotowym Przypadek ogólny przedstaw
23 luty 07 (129) Rysunek 3.14 przedstawia uwalnianie od więzów członów w parze wyższej ki. 4. Poszcz
23 luty 07 (131) Dwa pierwsze równania (3.21) przedstawiają sumy współrzędnych wszystkich sił działa
23 luty 07 (141) Mechanizm obciążony siłami zewnętrznymi, czyli siłami bezwładności i oporu użyteczn
23 luty 07 (144) Rozwiązanie graficzne równania (P3.18) przedstawiono na rysunku 3.24b. Wartość reak
23 luty 07 (67) Przedstawione na rysunkach 2.15-2.20 plany prędkości i przyspieszeń pozwalają na dok
23 luty 07 * * AA>TEORIA MASZYN I $ Q19-2004 JOZEF FELIS, HUBERT JAWOROWSKI, JACEK CIEŚLIK * *CZE
23 luty 07 (100) a) Koło centralne nieruchome średnica podziałowa kola 3 wyznaczona na podstawie war
23 luty 07 (101a) Analiza kinematyczna przekładni obiegowych Przekładnie obiegowe mają w ogólnym prz
23 luty 07 (101) Rys. 2.44. Schematy przekładni obiegowej z zaznaczonymi prędkościami kątowymi: a) b
23 luty 07 (102) koło bjest nieruchome, cob = 0, natomiast koło a i jarzmo są członami ruchomymi, ry
23 luty 07 (103) Dla przekładni o dwóch stopniach swobody (przekładnia różnicowa, rys. 2.44a), w któ
23 luty 07 (104) Rys. 2.45. Przekładnia obiegowa jednorzędowa o jednym stopniu swobody: a) schemat k
23 luty 07 (105) Ostatecznie przełożenie przekładni obiegowej wyniesiez3y Zj+z3 Zł) Z1 (P2.97) Przeł
23 luty 07 (106) Znak (-) we wzorze (P2.102) oznacza, że zwrot prędkości kątowej satelity 2 jest prz
więcej podobnych podstron