23 luty 07 (101a)
Analiza kinematyczna przekładni obiegowych
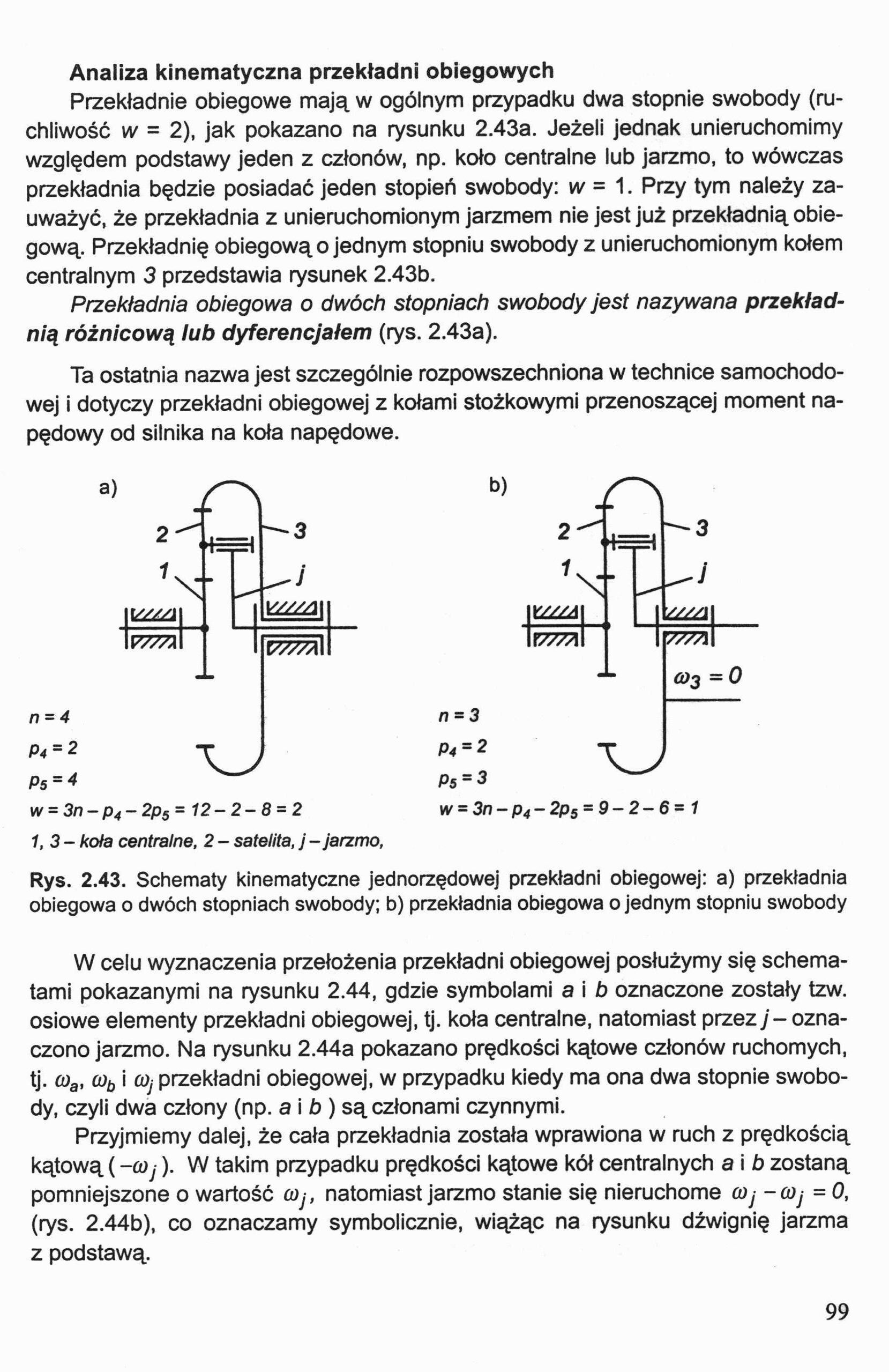
Przekładnie obiegowe mają w ogólnym przypadku dwa stopnie swobody (ruchliwość w = 2), jak pokazano na rysunku 2.43a. Jeżeli jednak unieruchomimy względem podstawy jeden z członów, np. koło centralne lub jarzmo, to wówczas przekładnia będzie posiadać jeden stopień swobody: w = 1. Przy tym należy zauważyć, że przekładnia z unieruchomionym jarzmem nie jest już przekładnią obiegową. Przekładnię obiegową o jednym stopniu swobody z unieruchomionym kołem centralnym 3 przedstawia rysunek 2.43b.
Przekładnia obiegowa o dwóch stopniach swobody jest nazywana przekładnią różnicową lub dyferencjałem (rys. 2.43a).
Ta ostatnia nazwa jest szczególnie rozpowszechniona w technice samochodowej i dotyczy przekładni obiegowej z kołami stożkowymi przenoszącej moment napędowy od silnika na koła napędowe.
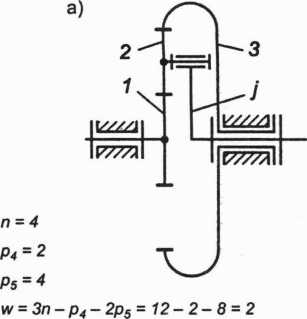
1,3- koła centralne, 2 - satelita, j - jarzmo,
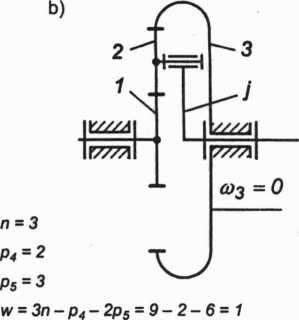
Rys. 2.43. Schematy kinematyczne jednorzędowej przekładni obiegowej: a) przekładnia obiegowa o dwóch stopniach swobody; b) przekładnia obiegowa o jednym stopniu swobody
W celu wyznaczenia przełożenia przekładni obiegowej posłużymy się schematami pokazanymi na rysunku 2.44, gdzie symbolami a i b oznaczone zostały tzw. osiowe elementy przekładni obiegowej, tj. koła centralne, natomiast przez j-oznaczono jarzmo. Na rysunku 2.44a pokazano prędkości kątowe członów ruchomych, tj. cog, cob i (Oj przekładni obiegowej, w przypadku kiedy ma ona dwa stopnie swobody, czyli dwa człony (np. a i b ) są członami czynnymi.
Przyjmiemy dalej, że cała przekładnia została wprawiona w ruch z prędkością kątową (-coj). W takim przypadku prędkości kątowe kół centralnych a i b zostaną pomniejszone o wartość coj, natomiast jarzmo stanie się nieruchome coj - coj = 0, (rys. 2.44b), co oznaczamy symbolicznie, wiążąc na rysunku dźwignię jarzma z podstawą.
99
Wyszukiwarka
Podobne podstrony:
23 luty 07 (93) 2.3.2. Analiza kinematyczna przekładni kołowych Przekładnie kołowe są mechanizmami k
23 luty 07 (38) 2. ANALIZA KINEMATYCZNA MECHANIZMÓW PŁASKICH2.1. CELI ZAKRESANALIZY KINEMATYCZNEJ ME
23 luty 07 (104) Rys. 2.45. Przekładnia obiegowa jednorzędowa o jednym stopniu swobody: a) schemat k
23 luty 07 (105) Ostatecznie przełożenie przekładni obiegowej wyniesiez3y Zj+z3 Zł) Z1 (P2.97) Przeł
23 luty 07 (108) Rozwiązanie Przełożenie przekładni można zapisać /)3 = —. 3j Wykorzystamy wzór na
23 luty 07 (109) Rozwiązanie Przełożenie przekładni obliczamy podobnie jak przełożenie iJ23 w przykł
23 luty 07 (110) Schemat kompletnej przekładni różnicowej stożkowej oraz jej schemat bez przesztywni
23 luty 07 (124) Para kinematyczna klasy 5 obrotowa - przegub walcowy Jeżeli pominiemy tarcie, to ki
23 luty 07 (125) Para kinematyczna klasa 5 postępowa - suwak i prowadnica Możliwe są trzy warianty u
23 luty 07 (19) Schemat kinematyczny w układzie płaskim V Rys. 1.10. Sporządzanie schematu kinematyc
23 luty 07 (101) Rys. 2.44. Schematy przekładni obiegowej z zaznaczonymi prędkościami kątowymi: a) b
23 luty 07 (18) Rys. 1.9. Łańcuch kinematyczny zamknięty mechanizmu dźwigniowego kruszarki W celu an
23 luty 07 (35) Przykład 1.15 (rys. 1.26) Analizowany łańcuch kinematyczny jest mechanizmem klasy 3
23 luty 07 (99) Na rysunkach 2.41 i 2.42 pokazano schemat konstrukcyjny jednorzędowej przekładni obi
23 luty 07 (103) Dla przekładni o dwóch stopniach swobody (przekładnia różnicowa, rys. 2.44a), w któ
23 luty 07 (111) Zróżnicowanie prędkości kół umożliwia przekładnia stożkowa złożona z kół 3, 4 i 5,
23 luty 07 (112) Rys. 2.51. Schemat konstrukcyjny przekładni kształtowo-tocznej, e- mimośród - Rys.
23 luty 07 (114) Pierwsze zadanie dynamiki. Dla zadanych kinematycznych równań ruchu mechanizmu nale
23 luty 07 (117) Siły wewnętrzne, czyli reakcje w parach kinematycznych, oznaczono symbolami, które
więcej podobnych podstron